If you’re looking to learn the art of playing Japanese drums, or Taiko, this hack, done as a school project by [Cornell] students, could be a really helpful aid. The project write-up is very impressive and includes a detailed explanation of their work, the source code, and a bill of materials if you’d like to try to duplicate this device.
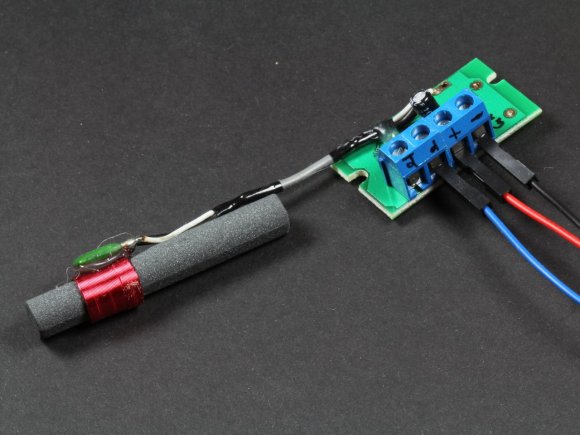
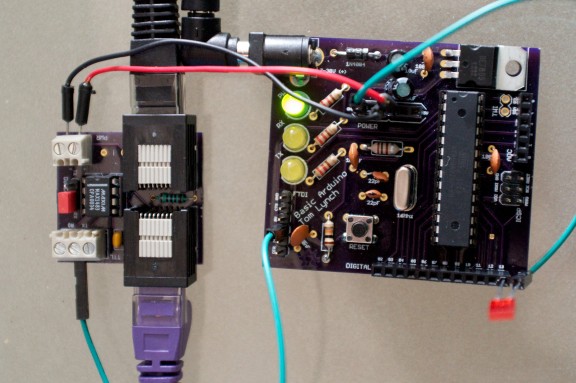
The tutor device is able to tell between soft hits, hard hits, and rimshots using a piezoelectric sensor hooked up to an ATmega1284P microcontroller. This data can then be transmitted to the “follower” drum using an infrared transmitter. These beats can be used in several modes including: follow the leader, metronome, repeat after me, and drum battle mode.
Ok, maybe there’s no drum battle mode, but be sure to check out the demonstration of the Taiko teaching aid after the break. There’s a lot of details about the build, but they start some calibration drumming around 4:00 if you’d just like to see it in action. Continue reading “Japanese Drumming Sensei”