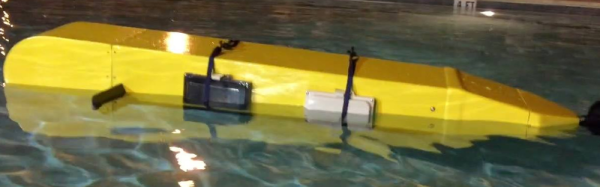
If you want to make a submersible robot (or, really, any robot) you can either design it for a specific mission, or you can try to make it general purpose. The researchers at the Cura Oceanus Foundation opted for the latter approach with RiverBot, a community-designed unmanned submersible.
Comparing it to the Space Shuttle, the RiverBot has payload bays that accept sensor kits or custom-made payloads. The builders hope to provide a platform for students and others and want to have students start with RiverBot in middle school, and keep working with the program all the way up to the PhD level.










