In case you weren’t already depressed about not starting a summer project already, a couple of guys are building a gigantic rideable hexapod they call Stompy.
The project leaders, [Gui Cavalcanti], [Dan Cody], and [James Whong] have worked on a few crazy robotics projects before like PETMAN and BigDog. Stompy won’t be a military-backed project like the others (we sincerely hope), so they’re enlisting the help of fellow makers at Artisan’s Asylum to complete a 15-foot diameter, 1-2 ton rideable hexapod before the end of August.
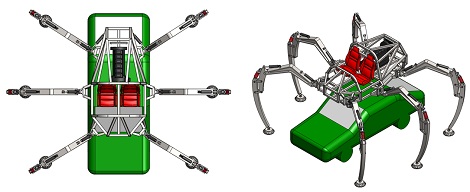
Right now, the team is still in the planning and preliminary testing stages. So far, they’ve built a 1/2 scale model of one leg to figure out the control systems, and getting the repurposed forklift motor up and running. It may not look like much now, but we’re sure the team is going to have a very fun time building Stompy.
You can check out the updates and progress of Stompy on the Project Hexapod blog















I’m no grammar nazi, but this depresses me:
“6 legs are required for a static gate“
Hopefully you meant “disappoints me” ;-)
no… I’m Marvin… I feel depressed, crummy, dejected, blue…
especially about that… luckily they use the right word later on…
Oh man would I love to ride one of those to work. It’d be one hell of a conversation starter, that’s for sure.
“oh hey [kaluce] what the hell is that”
“oh nothing, just my REALLY AWESOME SPIDER ROBOT RIDE ARMOR” (you have to make it sound cooler by calling it a ride armor.)
“clearly you are a man among men. riding on a 2 ton machine.”
Or something like that. yeah, I’m sure it’d be something like that.
A “man among men” might not be a compliment.
In the PDF under sensor options:
– Microphone to detect impact/screams
Excellent!
Yeah, the pdf is actually quite nice for a minor overview of the challenges presented in the control system.
http://projecthexapod.com/blog/wp-content/uploads/2012/05/Controls_Overview_20120501.pdf
I really did like the microphone comment because I hadn’t considered using sound to determine if a leg had landed.
Not a good idea, because if you are not picky about what sounds like landing, impacts or any other loud noise could throw it off. Make it too picky, and stepping on something unusual (sand, for example) wouldn’t register.
Is that positive or negative feedback? :)
I love it although at first i thought the car was part of Stompy.
> before the end of August.
so glad i’m going to burning man this year ;)
Did they name is after Bart Simpson’s elephant?
That would be Stampy.
I’ll be very impressed if they can make this in under 100k in parts.
I’ll be impressed if they can make this at all, square-cube law be damned.
Give it 8 legs, I want a giant spider like the one from wild wild west
AFAIK insect locomotion is “easier” to replicate than arachnid. Details, if you don’t know how insects walk: http://www.mindcreators.com/InsectLocomotion.htm
Eh. Well apparently arachnid motion is just as simple: (pay attention to A, this is what the machine would do)
http://ars.els-cdn.com/content/image/1-s2.0-S0022191012000200-gr1.jpg
Here’s what the text says about the graphic, so good luck:
“Variations on alternating-tetrapod gaits in Arachnida. Panel A: idealized symmetrical alternating-tetrapod gait. Solid lines = period of foot contact. x axis = time relative to first full step-cycle. Letters and numbers represent leg side (L = Left, R = right) and number, from anterior to posterior. Panel B: gait diagram from spider (Hololena adnexa) running on flat surface at ∼30 cm/s (adapted from Spagna et al., 2011). x axis units = ms. Panel C: Amblypygida gait, which is tripod-like, with1 leg pair raised above surface (raised legs represented by hatched line). x axis units as in panel A. Panel D: scorpion gait, after Bowerman, 1975a. Average of metachronal alternating tetrapods with 10% lag between legs within a tetrapod, with L4-R3-L2-R1 R4-R3-R2-R1 pattern. x axis units represent full step-cycles.”
A pick from “Safety” section
You are a sack of meat, easily punctured by steel
http://projecthexapod.com/blog/wp-content/uploads/2012/04/Rideable-Hexapod-Intro-2012-04-171.pdf
Been done in a big way. But, it’s not like you can acquire something this expensive. Better to homebrew it.
http://www.youtube.com/watch?v=CJ08U9uPsAU