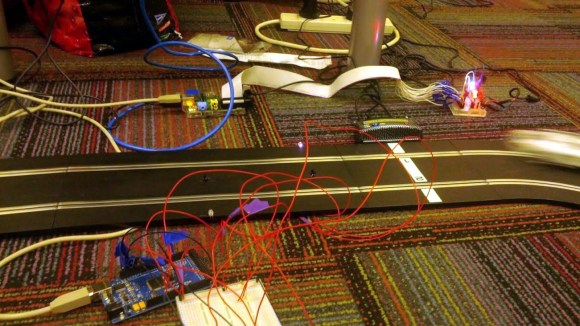
That blur on the right is a car racing into the frame. But look around the rest of the image and you’ll see the area is littered with extra hardware. [Matthew], [Doug], and [Barry] have been hard at work adding extra functionality and replacing the original controllers on this Scalextric slot car setup. So far it looks like their build log has not caught up with all the work they’ve done. We’re hoping to learn more details as they have time to write about them (this is coursework at University so we’re sure there’s a lot on their plates). But for now there are several videos and a gallery of images to drool over.
The cars are controlled by the voltage level in the track. The team replaced the stock controllers with a Raspberry Pi. It manages that voltage using Pulse-Width Modulation via MOSFETs. This allows the races to be automated but also makes it simple for a human operator to use just about any input device imaginable to control the cars. For good measure they also added a lap counter that uses an IR LED and detector to sense when a car passes the finish line.
After viewing several of their videos we think the goal of the project is to log the fasts times without sending the cars flying off the tracks during the turns.














That’s the goal of most types of auto racing.
This is one we developed at Glasgow Uni a few years ago – not dissimilar! http://www.youtube.com/watch?v=bfe85fIszr8
If your boards stop working mysteriously, check for ESD damage from the carpet.
Looks like awesome fun otherwise!
Its a shame there is no build log. I love the idea of a Playstation controller to control the cars. I like the idea of electronics and Scalextrics for that matter. Any idea why there are so many wires? :) I just thought it was variable voltage to the track at one point.
This has some cool options beyond a simple trigger for racing. two big arcade buttons. to race you have to hit it fast over and over. or take a small crank and make the players crank a handle to race… faster cranking = faster car…
Such a shame that slotless electric race sets went away. Anyone else remember the Aurora XLerators (accelerators) sets? http://www.tycotcrracing.com/index.php/chassis-versions/other-manufactures-of-slotless-systems/aurora-xlerators/
Now they need to build a robot marshal that picks up and puts crashed cars back on track.
We may update the google-code site with a build-log, unfortunately have other commitments at the moment! The reason the cars are flying off the track continuously is a function of the (modest) skill level of the operators and not an indicator of the accuracy of our hardware or control software.
@Roger – well spotted, most cables are redundant for this project, some are untidy side-effects of its prototype status, some are connected to the light gate-arrays and also Matt hooked up most (or all) pin outs from his raspberry-pi to the bread a breadboard for his own purposes!
When I was kid I had a scalextric track and in order to always have a car to race against I automated one car by taping its controller on max and putting insulating tape over the track power line before the corners to cut the power as the car passed over. With a good deal of trial and error regarding placement and size of the taped areas I got the car whizzing round at a rate I had great difficulty beating with the other self operated car.
Something tells me that were I still a kid with a scalectrix I’d be trying Doug and Barry’s method out right now rather than typing this :-)
Nice post ! Great to see people using the Rasberry PI for stuff like this and this looks so much fun:)
Interesting way to realize this project. I also spend some thoughts and ours in a similar project. My tutorial for a ‘script controlled ghost car’ is online since yesterday:
http://pisophy.wordpress.com/controlling-a-slot-car-with-the-piface/
May be you some ideas are also interesting for you.