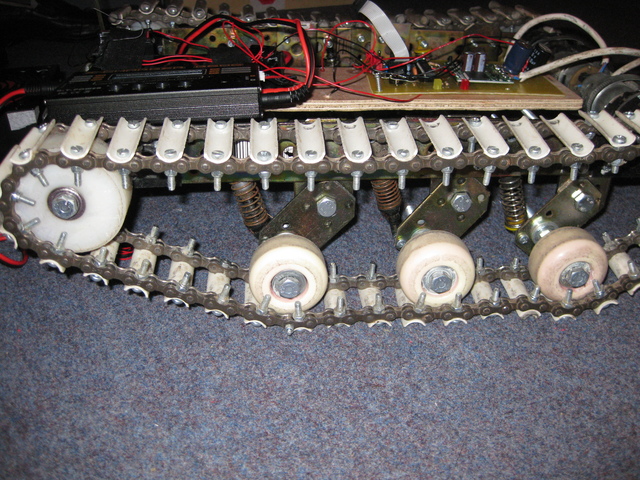
There’s all kinds of interesting things going into this tank robot build, but that beautiful suspension system immediately caught our eye. It helps to protect the body of the robot from being shaken apart when traveling over rough surfaces. Make sure to check out the four parts of the build log which are found on the left sidebar at the post linked above.
This a Master’s thesis project and has been built from common parts. The motors for the treads are pulled from a pair of cordless drills, with some capacitors added to help combat the draw when they start up. The treads themselves are each made from a pair of bicycle chains connected with numerous PVC pipe segments. The curved section of each PVC piece goes toward the chain, leaving the edges toward the ground for great traction. The tree wheels which support the middle of the tread each have a hinge and spring to absorb the shock of running full speed into concrete sidewalk corners like we see in the video after the break.













What an awesome project for a master’s thesis. Mine was a steaming pile of crap next to this.
Man, I loved the idea for the treads…
+1
What the hell is a tree wheel?
I was going to LMGTFY, but then I realized I have no clue what it is either, and neither does Google.
Hrm.
Three wheels
Yea, he meant to say “three” wheels, but his New York accent got in the way. “You see doze tree wheels dere?” – the way he normally types you almost never encounter it. ;-)
This is an utterly amazing build! so much so that I’m amending a mowbot’s suspension to take that into account: it’s utterly brilliant! Wow!
And made from such off the shelf parts, really nice. Suck it Rommel!
Looks like a version of Christie suspension, nice.
Nice job! Do the treads slip at all when they are running or is the tension enough to make up for the lack of sprocket wheels? I would love to get a masters for something like this. Keep up the good work.
Looks like if they wanted to, they could carve the drive wheels to match the PVC for some amount of sprocket action. Not immune to slip, but maybe better than a plain roller.
Hi, I had slippage so in this PVC design i used bolts in between the track pads. The image actually shows the back roller, not the one attached to the motor.
Here is an image showing the roller with the bolts
http://robolex.com/images/images_tracked_robot/tanky1/IMG_3804.jpg
aha! someone figured out a way to pull of using bike chain! good stuff!
I am pretty sure that the tread design was copied from amando96’s tutorial on LMR [http://letsmakerobots.com/node/21908]. If credit had been given in the original Masters thesis, no problem. However, the fact that there is no mention of where the idea came from originally makes me strongly suspicious. Would one of the HAD editors mind adding the link to the LMR tutorial to the post? Thanks!
Which in turn is ripped (with credit somewhere) from rctankcombat.com who have built machines identical to this but with paintball markers and a body…
Honestly, impressed but its not new at all
If you read through his website you will see that this version was not the one used because the PVC curves of the pipes induced vibration.
I wish my post grad work was as interesting =). Looks cool. And if it’s plagairised, NXT just cost him his degree…
If you go to his site http://www.robolex.com you see that it now has object recognition with a kinect, new treads, and a modified tread suspension system.
I love the tracks! Innovative!
Nice build.
Any one know what was used for the leaves in the leaf sprung version?
J
Hi James,
I think I mentioned it somewhere on my website, oh well.The leaf spring suspension design used carbon steel saw blade pieces. The blades are stacked to adjust the stiffness of the suspension. I used 4 saw blade pieces for the front wheels and 3 for the rest.
” this tank robot build, …..
This a Master’s thesis project ”
Can you explain why this is a robot and not a remote control vehicle. How was this used to get a masters? What college awards degrees for this kind of research? I need to get in ASAP. How much did it cost for your masters?
Hi,
Indeed in the video it is just remotely controlled which is not that cool. However this is a very old version and even at its final version, the robot took around 10-15% of the whole project. What’s not mentioned in this article are the rest of the parts of the project that deal with the autonomy, mapping, object recognition and path planning. Check the link in the article if interested. Have a nice day!