[Jason] has continued to plug along with his sonar build and recently showed up a monostatic active sonar using a piezo element and microphone. Regular readers will remember [Jason’s] experiments from a Fail of the Week post which focused on his water-proofing woes from a much earlier prototype.
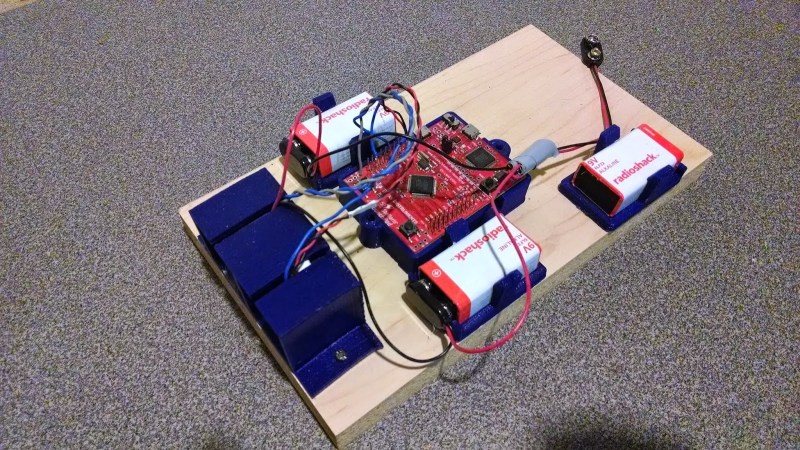
We find this offering far more engaging. He has ditched the ultrasonic module seen in those experiments. The new rig drives the piezo element using a 27V source. After each ping is sent out, the microphone input is immediately captured to detect the return of the audible sound. [Jason] mentions that the TI Launchpad he’s using for the project is fast enough for these experiments but he may switch to a Teensy 3.1 in order to double the RAM and thereby increase the sample size he is able to record.
Of course this is intended for underwater ROVs so his next iteration will involve a DIY hydrophone. We can’t wait to see that one as the process of converting this test rig into one that works underwater evades us. If you have some tips on that topic please let us know in the comments.
[via Dangerous Protoypes]














Since the last time that this was posted I had intended to build an acoustic altimeter, but abandoned it because it would have required us to step the voltage up higher than what was allowed. None the less, I toured a lab and talked with some people that make them. The material can be sourced from here ( https://www.americanpiezo.com/piezo-sale/piezoelectric-ceramics.html ) I believe that there is a $150 minimum order, and I am not sure if the material is painted or not, but the engineers and salesman at this place are very nice and were willing to answer all of my questions.
The best material for sonar is the 840 which is equivalent to Navy Type I ( https://www.americanpiezo.com/apc-materials/physical-piezoelectric-properties.html ) which is also equivalent to PZT-4 ( http://bostonpiezooptics.com/equivalent-ceramic-materials ) and is used for sending and receiving (Some ceramics are better for receiving only such as with a hydro-phone). The ceramic is painted with a special material and then heated and treated with a very high voltage to essentially turn a piece of iron into a magnetic. Then a housing is designed, and the shape is machined out of a piece of aluminum. The ceramics are coated with a polyurethane which is acoustically similar to water and the rest is potted in an epoxy.
The piezo calculator and ‘Knowledge Center’ are very helpful for spec’ing parts.
I was going to try to match this ( http://www.km.kongsberg.com/ks/web/nokbg0397.nsf/AllWeb/C3D587C1B93724AAC1257BAC0028C2B2/$file/Altimeter-brochure.pdf?OpenElement ) at 675kHz which is in the imaging range.
Thanks! Great info! =)
Thanks guys, I appreciate the post. To clarify, the version working in water will require two potted piezo transducers. The Amplified mic will be replaced with an amplified piezo transducer acting as a receiver. This was to test the algorithm implementation on the microprocessor. Just trying to isolate and test one part at a time. :-)
A piezo is perfect for underwater as you can seal it around the edge of the metal disk.
A piezo would also work well as a microphone as well after all piezo is a two way effect, movement causes voltage and voltage causes movement.
The problem will be the piezo being driven into mechanical saturation by the dynamic hydro pressures of the ROV maneuvering.
The only solution I can think of is to have the piezo(s) mounted in sealed units ahead of the ROV and have a very small surface area for the hydro acoustic path, like a pin hole or a bit larger. You could work out a hydro dynamic shape with a simple ‘water tunnel’.
Another solution is to make the back pressure of the piezo equal to the front pressure at all times.
Suppose your piezo is facing forward and has an aperture of 1″. Have a 2nd 1″ aperture, also facing forward, leading to the back side of the transducer. Now, any extra pressure on the front face of the transducer is compensated by an equal amount of pressure on the back face.
But what would that do to the accoustic performance of the setup?
In air that depends more on temperature than on pressure. Perhaps the same is true for water.
Awesome, One of the things I’ve been sorta noodling on for a while now is possibly adding sonar to an ROV project. Which keeps getting sidetracked and at present has somehow morphed into a lawnmower project that keeps getting sidetracked :P
Very interesting:
Chirp Sonar on PC:
http://www.eddiem.com/projects/chirp/chirp.htm
http://www.dj5hg.de/sonar/pcsonar.pdf
Altimeter – http://scholar.lib.vt.edu/theses/available/etd-02182005-150817/unrestricted/luan_thesis.pdf
From a purely electrical standpoint, a typical piezo will easily survive at least 75V. But the piezo material will crack if subjected to excessive mechanical stress, and since it converts voltage into mechanical motion, that imposes a lower limit. As cracks accumulate, sounds output diminishes. This can be a rapid or gradual process, depending on how hard it’s driven. I hear 25V is often considered a safe max. 27V is probably OK, but I would establish some means of measuring its output for later comparison. If you find output has dropped, it’s being driven too hard.
Also, there’s a way to reduce power consumption, if that’s an issue. Put an inductor in series with the piezo, with the value chosen so that it forms a resonant circuit at the frequency of interest. Resonance allows generation of voltages across the piezo *higher* than the power supply, with 25V easily being produced from 9V, and with small power input. This works best for driving at a single frequency, and I see you’re using a chirped design; which makes things more complicated, but you can still take advantage of this. Set the inductor for your center frequency of 6,500hz. At 5,000 or 8,000hz, you’ll be driving the circuit 23% off its resonant point, but you will still get some conserved energy; and voltage amplification, which will probably allow you to eliminate one of the batteries. The big challenge is altering the duty cycle of the driving pulses across the sweep so that a consistent driving voltage is maintained. At the resonant frequency the pulses must be small to avoid producing too much voltage, and at the extremes the pulses must be larger to make up for losses.
Thanks Chris, that’s great information.
A magnetic amplifier ought to let you vary the inductance along with the sweep… I should actually do that experiment and report the results.
The inductor in this function does power factor correction, just like a capacitor on an AC motor does.
The part of this that I am most concerned about is driving a piezo with sufficient power – I’m more a software guy than electrical, so I expect some challenges there. In order to deal with the increased attenuation of water vs air and the reduced reflectivity of the soft bottom of a lake, I expect to need substantial power. I’m playing with small piezo disks right now but I don’t expect them to be adequate for a useful system.
I’m pretty sure the rest is doable.
I think the best bet is wrapping your own transformer.
Don’t you mean decreased attenuation? Water is a much better conductor of sound than air. You just need to make sure your transducers are impedance-matched to water rather than to air to get good transduction efficiency.
I’m only vaguely familiar with magnetic amplifiers. Could one work with a low enough DC biasing current, that it would still be advantageous in terms of power consumption, over direct non-resonant piezo drive? If so, I’d love to see any additional info or experimental results you could provide. (Though keep in mind it’s easy to go over my head on this one, I’m like [Jason] and more a software guy, inductors in particular are a weak point for me.)
The most lucid account of the technology that I’ve come across is this:
http://www.rfcafe.com/references/popular-electronics/magnetic-amplifiers-jul-1960-popular-electronics.htm
For the modern way of winding coils, this appears to be good documentation:
http://en.wikipedia.org/wiki/Toroidal_inductors_and_transformers
In place of a bias winding, it may be possible to use permanent magnets to get the desired base level of flux. The picture at http://armyengineer.tpub.com/TC-9-62/TC-9-620307.htm documents how one may wind a full-wave saturable core with two toroids. It doesn’t show the winding strategy in the Wikipedia article, but that is presumably not a great mystery. I’ll know once I have completed my experiments. The main reason to use a full-wave configuration appears to be that the control voltage does not need to oppose the load.
No one needs to apologize for finding inductors confusing. There is even talk that a saturable core is voltage controlled instead of current controlled. Supposedly the control winding needs only be 1/1000th the current of the load winding. I intend to start my tests with a large number of fine gauge wire turns for the DC control winding, and low number of turns for the load winding. For this, two microwave oven transformers clamped together might serve up to about 400Hz because of the laminated core material. (BTW, a class-D amplifier serves well to supply 400Hz.)
The tech is very versatile. Here’s some retrotech video from another perspective on this:
https://www.youtube.com/watch?v=HPT7Wtp3yoo
https://www.youtube.com/watch?v=An-GIhx0z4c
Thank you! Will have to watch the videos later, but the other links definitely improved to my understanding. One more, referenced by the rather sparse Wiki article, goes into more detail on the two-core topology:
http://web.archive.org/web/20090603071406/http://www.butlerwinding.com/elelectronic-transformer/mag-amp.html
Even in the semiconductor era, these still look useful in the right application. I’m surprised I haven’t run into one before.
@Chris C. : Magnetic Amplifiers are big & heavy compared to a transistor or similar such thing, which tends to make their usage discouraged for electronics. Supposedly they’re pretty close to THE way to go for controlling large industrial machinery. Something more compact could probably be made for use on breadboards, but I’ve never actually heard of one (it would probably reach saturation a lot faster too).
This one was interesting. https://www.youtube.com/watch?v=7jC55WLdDbs
Hi,
I am trying to build an home sonar for fishing. I have 2 questions:
Which bonding material do you recommend for bonding the piezo to the case?
Did you implement variable gain for the echo?
Regards,
Raz
I am starting a project which is the same thing only different. This article has been going on for over three years, and has a lot of info. and ideas. Very well done. I am looking for the latest thoughts on piezo elements. Do I do my own water proofing or what is a good combination of the water proof ones. I want to use a separate speaker and microphone, and have them separated a few inches. They can be the same, but is there better combinations if I use different elements? If so, what is a good one for transmitting and receiving? Maximum depth I will be going is a few feet, so shouldn’t need a lot of power. I think the higher the freq. the better, but not sure just where needed yet. —– So what is the latest and greatest at a good price. — Thanks