There’s many complex systems for automatically pointing a telescope at an object in the sky, but most of them are too expensive for the amateur astronomer. [Kevin]’s Arduino ST4 interface lets you connect your PC to a reasonably priced motorized telescope mount, without ripping it apart.
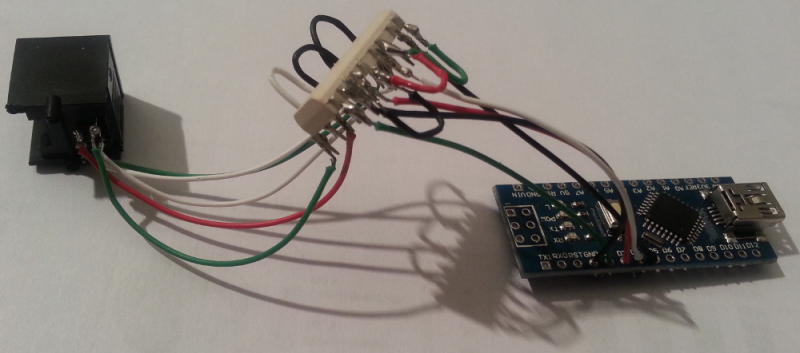
The ST4 port is a very basic interface. There’s one pin per direction that the mount can move, and a common pin. This port can be added to just about any motorized mount with some modification to the controller. To connect to an Arduino, a TLP521-4 quad optoisolator is used. This keeps the Arduino and PC fully isolated from the motor circuits. but lets the Arduino take control of the mount.
With the hardware in place, [Kevin] cranked out some software which is available on Google Code. A simple Arduino sketch provides the USB interface, and a custom driver allows the ASCOM Platform to control the mount. Since many astronomy software tools support ASCOM, this allows the mount to be controlled by existing software.
With the interface in place, the mount can be used to find objects (GOTO) and automatically follow them with high accuracy (autoguiding). You can watch the telescope move on its own after the break.














Cheap? Are you kiding? Most of the ST4 units on the market cost less than an Arduino… And at around $30 is a rounding error in the cost of a telescope and motorised mount.
the control software & electronics are peanuts, making a mechanical motorized mount that is affordable and actually usable is what is stopping everyone else from building these, not to mention the price of the optics in those telescopes.
The price is the price for a reason, try grinding your own lenses – it takes a lot of time! There was a CCC lecture about making your own telescopes.
http://events.ccc.de/congress/2014/Fahrplan/events/5931.html
And here is the video
http://media.ccc.de/browse/congress/2014/31c3_-_5931_-_en_-_saal_g_-_201412301715_-_telescope_making_-_madonius.html
Lol… Grinding lenses for serious astronomy will be reaaaally expensive for an amateur astronomer. Just make high quality optic glass will be a task worth to a price (maybe HDP ? :). If I was able to develop a technique to make optical quality glass, I’ll not going to make telescopes (reflectors are far cheaper and don’t require optical glass, the mirrors are made of pirex glass). No, I will do filters. A research grade filter for photometric measurements (even in 1,25” aperture) cost $200 and you need more than one. Cameras are expensive, mounts with accurate tracking are expensive… I afraid that the telescope itself is not the priciest item in the whole package.
We have a saying between the amateur astronomers. If you can make your children into astrophotography, they will never have enough money for alcohol and drugs…
The cost of the parts for this project was 6 USD. If you know of an ST-4 to USB adapter below this price, I would be interested to know as the cheapest commercial one I could find was 80 USD (GPUSB).
Beside this, all the commercial adapters I could see on the internet seem to be only able to do autoguiding.
I built this with the GOTO functionality in mind, which is what I was interested in the first place since I am very bad at locating deep sky objects :)
ZWO has a USB to ST4 adapter for around $50. Either this project, nor GPUSB or ZWO adapter includes the motors, and the first and the third AFAIK also doesn’t include the ST4 port for the mount. The middle end motorized mounts as HEQ5 and EQ6 already have a built in ST4 port but usually you need a camera to send the guiding commands to the mount and the cheapest ones are around $100. Also, this mounts can cost more than a thousand dollars but the speed of the motors make the slew between whatever two targets in less than a minute. You can adapt the low end mounts motors and add a ST4 port, but in this case, the motors doesn’t move faster than 8x of the sidereal velocity so, moving between targets can take more than 20 minutes if both are far way one of the other.
You are correct, this project is about controlling a low end motorized mount, so you will need one in the first place.
I did it to make some features available to people who know how to use a solder iron and don’t want to buy multi-thousand dollar telescopes.
However, I don’t think that the two adapters you mention (ZWO and GPUSB) are providing GOTO, which is the feature I am most interrested in.
About the guiding camera, no need for a fancy one since the project presented here is already able to pulse-guide the mount, a simple webcam with exposure control will do the trick :)
About the slew speed, you are also right, it is slow, but if the telescope is pointed to a star not too far away from the target, the time is very acceptable, in fact, in most of the cases, it is much quicker to let the computer do the slew than to try to manually find the object with a sky map :)
“”About the guiding camera, no need for a fancy one since the project presented here is already able to pulse-guide the mount, a simple webcam with exposure control will do the trick :)””
This is way I found this project so good.. Kudos again!!
I dont see how this can be used for go-to, the controller has no idea where the scope is pointing or how far it moves when the ST4 pin is activated.
I don’t understand this either. All of the mounts I’ve seen have an rs232 which you can use to send GOTO commands instead of just ‘up down left right’ commands. I have a Celestron Nexstar and you only need a cheap serial cable to tell the scope where to point once it’s aligned, no modifications required. Surely his much nicer mount has something similar.
Yep, I have a LX200 and I can connect it to a pc via a usb-serial adapter and control it though stellarium or ascom apps. There are even wifi-rs232 adapters out there to control the scope from your smartphone. Even the cheap(ish) mounts on the lower end scopes still have serial on the autostar controller.
Under the $500 price range, motorized mounts are very basic with no computer interface. This project targets those mounts.
There are many scopes from meade and celestron with full computerized go-to alt-az mounts in the $300-$400 range. With fpgas the amount of electronics needed to do this pretty much entirely fits in the hand pendant now vs the old go-to controls like the one in my old lx200 where it is a pretty decent sized circuit board in the base.
The GOTO mounts in the $300 price range are for very small telescopes, so mounting the 8″ tube I have on it would be impossible.
The price of the basic mount I own is $400, which is I guess about the less expensive one could find for the weight range it can support.
However, the GOTO upgrade kit for it costs $500, which is around two orders of magnitude more expensive than this project :)
Have you ever checked out the Sidereal Tech drives. I think I am going to buy one for the mount I have been building. Their basic servo controller is $400. I can even do fun stuff like satellite tracking.
I was trying to use the OnStep, http://www.stellarjourney.com/index.php?r=site/equipment_onstep, butt there are a few things that just are not working well for me with it so I am going to have to try something else.
OneStep looks interesting, but I don’t feel like drilling into my mount in order to attach the motors.
$400 for a servo controller seems very expensive to me.
Calibration and counting my friend. There’s actually very VERY few mounts which know where they are pointing. Only the top of the range mounts have encoders, the rest rely on the step size of the stepper motors.
For most that’s a simple equation. Many of those are published on line and you know how many steps give you how many arc seconds etc. For those that don’t there’s a point and pray method. I’ve seen at least one software package in use at one of the astronomy nights which, without knowing anything about the mount asks you to point to three stars, from within the software package. It keeps track of how many signals were sent and from that calculates the movement per step on the mount. From there all you need to do is make sure you are pointing to one specific start and everything from there is relative.
Yes, it’s exactly how it works :)
You need to point the telescope at a known star, and tell this to the control progam (Stellarium / Cartes du Ciel).
After this, the driver will know how long it needs to keep the telescope moving in each direction from the delta in position and the speed of both axis.
It works very accurately when the polar alignment is good.
Not true. Almost all mounts out there with go-to capability are dc servo driven with encoders. These are VERY cheap motors and encoders, but it does not take much. Lots of gearing on the motor lets them get away with rather rough encoder wheels. Some very cheap home made mounts do use steppers but they are avoided because of the vibration and if you want to do stuff like PEC (Periodic Error Correction) you need an encoder.
The ST4 input is intended for used with a guide output from a CCD camera and was named after the SBIG ST4 CCD camera. The camera would put out signals for 4 directions of movement to keep the telescope on track with the guide star. There is no specific pulsing, it is just stop and go.
Three star alignment is basic for most mounts. I am willing to bet the software they were running was a little more than you thought it was.
Note that the telescope in the video is on an equatorial mount. They are more difficult to set up with the rotation axis parallel with Earth’s, but automated tracking is easier since only one axis must rotate. Before computer controlled tracking astronomers used clock driven mechanisms.
Simpler to set up but more complex to control are two axis mounts. Simply level them, find three guide stars of known location and set the computer control on each of them. From there it calculates where every other object in its database is and can move the telescope to any of them and track them as the Earth rotates.
One of the drawback of dobson mounts beside the additional complexity of the control software is in my opinion that the field of view is rotating inside the ocular as the mount keeps tracking the object (because the telescope tube itself do not follow the earth rotation).
This makes long exposure photography blurry.
Kudos!! Nice project. A thought about ASCOM…
ASCOM is shit. It’s not standard, not well documented, not open (the project only provides a .dll with no source code). Actually only works in Windows (more or less) and if any of you already tried to code something related to, I’m sure you know what I’m talking about… However, every single program for windows managed to support ASCOM somehow and every single hardware developer provides the ASCOM driver for it’s devices.
INDI is a real standard and should be used instead, however, less applications give support for it. Stellarium and Kstars, both support INDI very well and are multiplataform (win/linux/mac). So, somebody is already coding the INDI driver for this project or should I put my self into it?
Indeed, developing the ASCOM driver was painful.
I actually spent most of the time on this project understanding and reverse engineering the poorly documented API….
INDI driver is on the todo list, but I didn’t start coding yet :)