
BB-8 the new droid in the star wars franchise made his first public appearance (YouTube link) at Star Wars Celebration last week. While cast and crew of the movie have long said that BB-8 is real, seeing it up on stage, driving circles around R2D2 takes things to a whole new level. The question remains, how exactly does it work?
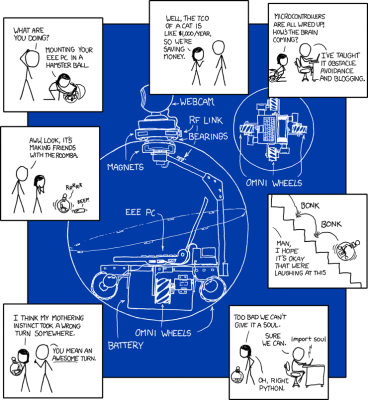 Our (and probably any other tech geek worth their salt’s) immediate reaction was to think of xkcd’s “New Pet” comic. All the way back in 2008, [Randall Munroe] suggested omnidirectional wheels and magnets could be used to create exactly this kind of ‘bot. Is this what’s going on inside BB-8? No one knows for sure, but that won’t stop us from trying to figure it out!
Our (and probably any other tech geek worth their salt’s) immediate reaction was to think of xkcd’s “New Pet” comic. All the way back in 2008, [Randall Munroe] suggested omnidirectional wheels and magnets could be used to create exactly this kind of ‘bot. Is this what’s going on inside BB-8? No one knows for sure, but that won’t stop us from trying to figure it out!
BB-8’s family tree may actually start with Sphero. Fortune reports that Sphero was part of Disney’s accelerator program in 2014. Each company in the accelerator program gets a mentor from Disney. Sphero’s mentor was Disney CEO Bob Iger himself.
The Head
So if BB-8’s body is based on a Sphero, how does the head work? The Disney crew has been mum on this so far, but there is plenty of speculation! If you watch the video in HD, several flashes can be seen between the body and head gap. These might be status LEDs on BB-8’s electronics, but they could also be IR LEDs – possibly part of an optical mouse style sensor. Sensor fusion between gyroscopes, accelerometers and the optical flow sensors would make for a robust solution to the inverted pendulum problem presented by BB-8’s head.
How do you think BB-8 works? Is it magnets, motors, or The Force? Let us know in the comments!














The comic strip can’t be correct. If it was, the head would move backwards if the robot is rolling forwards.
It looks like the head would just stay above the motorized part.
Yes, but in the speeds shown in the vids, it bobs in the direction it’s moving, which is impossible in the design by Munroe.
In that case you could also just make that arm holding the magnets moveable
Why is that impossible? The magnet/head assembly is on an arm which could be independently controlled from the motion of the body.
Why is that impossible?
Because the interior drive portion will have a tendency to ‘climb’ the sphere when it accelerates, which will move the rigid mag-link backwards in turn pulling the head back.
There would need to be some compensating motion to the mag-link arm to avoid this.
Why not think inverse? The ball is just a ball, the motors, etc are all in the head. It is still magnetically latched to the ball via a (hanging) weight inside the ball. This will make your forward motions force the head back.
that’s what i’m thinking too… ball is just a ball,seems head is the thing that does the trick
Notice there is a point when the head “looks” (0:58) but then the ball follows it like shoulders turning to follow the head. There must be a coordinated actuator inside the ball. Also I think the way it circles R2D2 would be tricky without some internal actuation.
Sort of. Drop it to a self balencing 2 wheeled robot and the leaning forward thing holds water
The comic is from 2008 and was more likely inspiration for the BB8..
The comic is not trying to describe how BB8 works. Since it is from 2008, it is more likely the inspiration for BB8
I gave my own explanation too: http://linuxdroids.com/2015/04/19/como-esta-hecho-bb8-el-nuevo-droide-de-starwars/
Did you made the gif animation? Isn’t the head jumping a bit?
No! I took the gif from a website! It’s true the head jumps a bit from the body. I also realize about that. I think that is an evidence that a set of magnets (electric magnets) are the mean to keep the head attached to the body, and no more.
That closeup shot is CGI
I would say the background is CGI, not the droid itself.
I also think the shot where the head is bouncing is CGI. The head is just bouncing a little too much, and too freely. Remember magnets are strongest when closest together. So it would take a lot of force to initially cause *any* separation of the head at all, and then only just a little more to get it to fly off altogether.
I suppose if you had no choice but to do this with a real prop, you could use magnets strong enough that it won’t separate at all. And the bouncing could be provided courtesy of a spring suspension that gives the outer head shell some degree of movement, independently of its guts. But, Occam’s Razor and all that. CGI is cheaper than complicating a physical design for what may be a single scene, unique in its requirements. Plus if you look close, the ‘bot appears to kick up no dust, nor leave tracks…
However, this doesn’t mean magnets *aren’t* used. At simplest, the body could be an omni-directional robot in a sphere. The head another omni-directional robot, self-balancing, with an adjustable balance point. Magnets would be quite useful for increasing the grip of the head’s wheels to the body, and help keep it from slipping off should the human remote control operator move it too far off center.
There’s several ways you could use magnets to get the desired effect. But the simplest and best do not require any arm like in the XKCD design, articulated or otherwise. Nor do they require electromagnets (too much battery drain), servos, Teflon (!), etc. I’d just put a permanent magnet in the base of the head. Then put another magnet in the sphere, allowed to roll freely around the inside of the sphere on a small platform with casters, which once attached will follow the head where ever it goes. That’s it, quite simple really. Though depending on the top movement speed (real, not CGI) of the robot, you might also want to avoid making the sphere from metal, including aluminum; as eddy currents would cause drag on the head.
I’m agree with you about not to use electromagnets. And about strong magnets, I would point neodynium ones out. As show in this video neodynium magnets coupling could be strong enough. And also i would may that rotation functionality reside inside the main body and not in the head, which would requiere to be light enough.
http://www.youtube.com/watch?v=zHU3oWvG9dk
Lucas can afford the really good neodymium magnets. :) The head appears to not only rotate but move completely independently of the body, that’s why I’m guessing it’s probably an independent omnidirectional ‘bot; which could still be fairly lightweight. It could be linked to the ‘bot inside the sphere through an arm with a magnetic coupler, but the arm would require three axis of articulation (x/y/rotate). That’s a little harder to build. And though it would make the head lighter, it would probably result in higher overall weight. But it could be done either way. Nice video, BTW. I knew about magnetic couplers, but it’s my first time seeing one demonstrated, and enjoyed it.
given the head bobbing back and forth as it moves, i think your design is only a little off-
something like http://imgur.com/yPphi7r , could even run a couple wires up through the tube to make a stronger electromagnetic coupling, then the head turning could be done with a single motor as opposed to 4 like some of the other designs, allowing for more room for camera and wifi interface and electronics, and less money spent on motors and things like accelerometers and gyros.
I don’t see the rationale about having a spring which will make the top arm retractes form the inner side of the sphere at the top, as shown in your sketch. I would think on a spring doing the oposiite. Just pushing the magnets againist the inner wall of the sphere at that top part.
that’s it’s purpose, keeping the magnet close to inner-wall of the sphere with an off-center pivot point- otherwise the pivot point of the arm would have to be the center of the sphere to maintain contact and equal distance as it wobbles back and forth. as another poster stated, with your design(not dissimilar from the xkcd pet design), the head would otherwise tilt backwards while the body moves forwards. Assuming it’s a not a balancing bot, this may well achieve a similar bob due to the weighted lever, as the sphere rolls forward the weight will move less than the sphere, causing the lever to pivot at the pivot point- resulting in the head moving towards the direction of travel. it’s extremely basic, and could probably use a couple more springs and another pivot point at the top where the magnets and bearings are but should still achieve the same desired effect assuming the proper weight is chosen.
The link you left is close to the solution but not the total solution…, The head of BB-8 is likely connected via magnetic coupling like in your vid. The difference is the diagram a the bottom of the page. the drive is in the ball but it is inverted. imagine a drive with 4 rollers maintaining contact with the inner surface of the ball. there is a weight at the bottom to keep the orientation of the drive. the motor is at the top of the ball. When the drive engages the force is exerted on the top of the ball and in the opposite direction of travel. This would cause the head to move toward the direction of travel and make it look like the droid was leaning the same way. The drive would have to be lightweight thus the reason for the slower speed of the droid on stage. For turning each roller or wheel could be actuated to effect a change in direction. I’m sure there are other points I’m missing here but I am also sure the actual mechanism is similar to my description. Let me know what you think.
Well, apart from theorizing a bit more on it, let’s have a look: http://makezine.com/2015/04/29/sphero-patent-suggests-magnetic-head-bb-8-droid/ .
It seems this could be the final explanation.
I was thinking the same thing with regards to the actual driving wheels resting at the top within the ball. However being at the top, the wheels would have more leverage on the weights in the lower halve. This could result in the drive wheels climbing down within the sphere and pushing the weight in the opposite direction. To rectify the ‘climbing,’ the whole mechanism would half to be stabilized somehow; with gyros, or perhaps even just an excessive amount of weight below the center of gravity.
Articulating arm?
I so want one so I’m going into the shop to work this one out.
This guy already started to build one:
https://www.youtube.com/watch?t=1101&v=dlwcXgZYImU
http://xrobots.co.uk/BB8/
looks like he’s going about it wrong though. from the video it looks as if the movement part is in the bottom and the head is attached by multiple magnets on an arm that shifts the center of mass to match the direction of movement, as well as control head orientation.
Yeah, James is going for a self balancing segway-with-four-weels thing over a lightweight ball. That’s the hard way, and he will find soon that any bump in the road will make the bot in danger of falling off the ball. But if he’s suscessful his design will have all the electronics in a single body, and you could just swap the ball for another (making it a funky and interesting cargo container and hauler system combo).
Why is that the wrong way? That’s exactly how it should work.
If you watch the video, the robot can move its head back and forth while the ball remains stationary and doesn’t roll. This ball balancing robot can’t do that.
Exactly my thoughts. The main system could be an independent, passively stable, balancing system like a Segway but working in 2 axes. It should have a mode switch for moving or staying stationary.
The control would be done by a 2 axis moving arm with its pivot exactly at the center of the sphere. Put magnets on a rotatable piece at the end of the arm and making BB-8 move is a simple matter of switching the base unit’s mode to moving then tilting the arm in the direction the operator wants it to go. The self balancing system attempts to get back under the offset weight of the arm and head, so off it rolls.
For stationary ‘acting’, switch the base to stationary mode and it switches to an alternate PID method to stay still instead of moving to try and get the CG underneath the offset weight.
Or instead of a moving/stationary toggle there could be a speed control to allow any range of motion between stationary and top speed.
Looks like a refined version of this:
https://www.youtube.com/watch?v=onVEeDn8xaE
It can’t work that way. I initially thought it used a set of wheels under the head, and using some simple gyroscope input, keeps the head stable while moving the lower body. However, there are times that the robot sits stationary, while the head freely moves around the body. This leads me to believe that the head is connected via a magnet. Inside the body, a servo and stepper motor turns a bar magnet, which maintains the positive and negative pull on a similar bar magnet found in the head. A coat of Teflon found only on the bowl shaped bottom of the head provides the easy gliding of both surfaces. The servos act to give the freedom of position on the body, while the stepper serves to spin and twist the head. The servo moves the stepper to the desired point under the body shell. It might be possible another stepper motor is below the servo, giving it the ability to add another joint of control. This would allow the servo to spin 360, and the servo arm to position the second servo with the magnet. Control of the lower body is aided by a gyro, using some form of wheel arrangement. Possibly 3 wheels for internal balancing of the electronics package with most of the weight distributed towards the lower center.
With the budget they have to build a few of these, with off the shelf parts, I suspect it’s far more complicated that what I described. However, it could easily be done this way. The body is most likely plastic, or some form of fiberglass composite, to make it lightweight and nonmagnetic.
Just seen the video, and I agree, it can’t be a self balancing head atop a ball, mus be something like you /xkcd explained/drafted.
Teardown anyone?
Could be two independent motor systems, not connected via magnets. One moves the head around the body, and one moving the body. This explains the head moving while the body is stationary and why the head leans towards the motion, its trying to stay on top.
that’s unlikely because this is a prop made by artist as cheaply and quickly as they could and not robotics students trying to making something cool and complex.
the simplest answer and most likely to be right answer is the magnet one
” artist as cheaply and quickly as they could”
people keep saying that, but these are Disney prop artists working on the new Star Wars movie. Compared to what CGI scenes could cost per minute, cheap is relative. And besides, even with a complex design they probably spent way more man hours on the paint job anyways.
being a Disney prop maker or being a star wars prop doesn’t change anything this is still just a prop it only purpose is to look cool. you’re not going to waste time making more complex then it has to be it just has to look like it is.
I guess I just think the assertion that it has to be very simple is invalid. They will make it do what they want however they know how to do it.
Or this:
https://www.youtube.com/watch?t=1174&v=dlwcXgZYImU
Led’s on the head are for effect only. This is a Movie prop not a real droid, there is no reason at all for the head to communicate with the body.
There is if you want it to be able to actually move without falling off, and also gives one remote control mechanism instead of two independent ones.
It doesn’t need to communicate to not fall off, it could do that automatically. Two independent control channels wouldn’t be unreasonable.
Given that it’s a movie prop, it’s likely that all the functions are simply being controlled by a couple of RC radio transmitters.
Someone is building one on youtube as well.
https://www.youtube.com/watch?v=dlwcXgZYImU
How about you put a SEGWAY inside it for locomotion and make the head a seperate system. The head would act like like the ball balancing robot and held to the surface of the body by a magnetic carriage riding on the inside of the body. You could make the head look down by moving the leveling sensors in the head. The head would move to re-level the sensor package.
two bots and a magnetic carriage:
1) one on top(head bot) rolling around
2) one inside the ball(body bot) at the bottom keeping mass low and takes commands from the head bot as to when to start moving and in what direction.
3) I suspect there’s a magnetic carriage inside the body bot helping to keep the head bot in constant contact with the body.
The body bot was stationary on stage while the head bot rolled around the top of the body. When given the command to move in a direction, the body bot starts moving that way and the head bot is commanded to rotate to that direction on the body and at a particular angle on the body/ball and giving an appearance of being the one moving like the head of a dog leading the body.
im thinking there is a 3 axis platform under the body that moves along the inner surface of the body. it also would provide the rotation.
im actually thinking some kind of system of 3 or more superconducting levitation magnets is keeping the head up, though something more mundane like bering castors or air cushion with permanent magnets might be used instead. i dont see any frost or fog from having a liquid nitrogen reservoir in there.
you might even have a single coil coupling in the center providing power, positional feedback for the head. perhaps also communication, though i figure the head is dumb and the whole droid is under remote control. remote control makes the most sense, its a promotional tool as well as a movie prop and they want flexibility that autonomous systems would not offer.
Obviously the base is weighted, and the weight inside moves around to move the body. And it can remain stationary while the head moves that way. The head clearly sits on rollers that can move it around. I bet it’s just strong permanent magnets holding the head to the body. I wonder how long the head can function before its internal batteries have to be replaced.
not so obvious to me.
I’m thinking of 3 flywheels mounted on 3 orthogonal shafts inside the sphere.
according to newton’s law (2nd?) they can induce torque.
this allows for the body to be able to accelerate in all directions and even to pivot around the vertical axis.
then, the head can be the self balancing bot as posted above.
I guess its basically the xkcd comic, but with an added moveable arm that acts as a “neck.” The head contains nothing, its more or less just a hat. The base of the head probably has a few omniwheels and is held in location by strong magnets on the “neck” arm.
If the head does contain something it has its own power source and communicates using radio with the rest of the robot.
There are probably a few power sources for lights and stuff. Guaranteed those lights on the outer ball just run of their own little button batteries, there’s no way they would take time to engineer something to pass power from the main carriage to the outside ball.
Radio control, probably separate operators for the body and the “neck.”
This isn’t a production model; its a movie prop. Its more or less an excellent kludge, there is minimal engineering and maximum pasting things together.
Why would this need to be any more complex than a ball balancing robot. Wheels in the head and the body is just a painted ball. The less in the body could be run off of watch batteries. This a solved problem.colleges do this sort of thing on a small scale as control systems projects
You wouldn’t be able to keep a ball bot stationarry and move the head down the side of the main body. The impressive part to me is the rotation of the body around the vertical axis only. The rest seems like a heavy omni wheeled bot in the bottom of the bodywould work fine. As would magnetic coupling of the head to the bot in the body. Something like an xbee would be enough for simple on/off LEDs and the like. I’d look at an 8+ channel RC reciever and transmitter setup. The head would need to be extreamly light.
This could be far more difficult if the head has much weight. The bot is very stable when sitting still and the head is moving. There could be a processor of somesort that move the body bot to compensate for the position of the head in real time. Though it could simply be a weight on the other end of the arm that cancles out the weight of the head.
It’d be a fun time to figure this all out and build one, but alas, i don’t have the time or $$$ for that.
because for starters the head is to small not enough mass to move the ball in the way it does (normally the bot has most of the mass not the ball) and a ball balancing bot can’t move round the top of the ball or rotate like it does in the video and not move the ball like it does.
to make it work the way it does in the video the “head” has to be little more then a hat and the control have to be in the ball.
They are 2 robots, one inside ball an the other over it. They communicate wireless and the one inside the ball make the movements and keep the ball in place, the other one just balance itself over the ball. they are not physically connected.
you’re over thinking this it’s a movie prop not a working robot there is no way there’d put that muck work into a prop. I would be amazed if there are more then some simple micro controls for the leds honestly, it all most likely control by radio controls. this is why the head is likely an empty shell on rollers controlled from inside the ball with magnets.
Dex – you’d be surprised how much engineering goes into some of these props. It’s one thing if the prop is to be used on a sound stage once. But quite another for a prop like BB-8, which is going to be on location, in numerous scenes of the movie. The device has to just work. Any failure means holding up the actors, director, the entire production company. It’s not a position you want to be in, and it’s one of the reasons why the folks who do this well tend to make the big bucks.
honestly its like everyone thinks I disrespecting prop makers because I said they make things simple….
a lot of engineering goes into making something simple often time more then than if it was complex so don’t let that fool you. besides your post proves my point “The device has to just work” so as a prop maker are they going to waist time on an overly complex device that far more likely to breakdown and harder to fix when it does or a simple device that can be easily fix.
OK. You are a troll apparently.
I am in no way shape or form a troll
A think of a two part system: Body like the Sphero, but with additional gyroscopic (spinning wheel) mass inside, which is used to turn on itself and also for better stabilization. The head is like a self balancing bot, because of the smooth head move, which communicates with the body. Using magnets on the spinning wheel does give a pretty good positioning system for the head.
you’re over thinking this it’s a movie prop not a working robot there is no way there’d put that muck work into a prop. I would be amazed if there are more then some simple micro controls for the leds honestly, it all most likely control by radio controls. this is why the head is likely an empty shell on rollers controlled from inside the ball with magnets.
I don’t know how much cost the time on the set, and they didn’t use cgi, which would be the cheapest way.
Magnetic connection (sounds so easy) would lead to erratic moves, troubles with dust and debris, magnetic bearings (which I did work with once) are way too complicated, but the head moves are really smooth.
And how can the body turn on its own axe? Their must be an inertial mass.
Animatronics guys have done real crazy stuff too.
you’d be amazed CGI is much more expensive and time consuming then making a real prop most of the time.
anyway you’re over thinking this again, I’m not taking about not magnetic bearings just simple house hold magnets. the whole machine is inside the ball, like a sphero inside the ball there is weighted base with two drive wheels that take care of moving the ball round. off the base you’s have a simple “arm” with two servos (one foe the x axis and one for the y axis (this moves the head around). at the end of the arm is a plate that can rotate ( to spin the head) with a group of magnets.
the “head” is a simple hollow dome with some blinking LEDs , matching group of magnets and some ball bearing rolls. the force of magnets hold the “head” against the outside of the ball as it get dragged around by the inner arm. ( like dragging a paper clip around a table with a magnet under the table.) having more then one magnet means you can spin it.
it’s that simple no computers just rc servos and radio controls and this set up has no erratic movements and unless the dust outs the head far enough away as to be outside the magnetic field it’s not really going to effect it.
I think you’re underestimating the amount of money they’re willing to spend. This is much more then a prop, it’s a *character* in a Star Wars movie.
If they spent half a million on the thing, it’s still little more then a rounding error on the overall budget.
it probably costs less than one actor’s salary.
r2 d2 is a “character” and it doesn’t mean they spend a lot of money on them or make them anything more than simple rc puppets heck even ET was a character and it was nothing but a puppet. I’m not underestimating anything I simply understand who is making these. they don’t build robots they build puppets so expecting them to be anything but simple puppets is wrong.
It’s a simple inverted pendulum system, like Segway, for the body and the head is a magnetically entrapped turret attached to the top of the pendulum The head clearly floats free if there is no post processing work to hide the reality. Wireless coms for all internal systems and a bit of telemetry sent back to the operator, FPV is very likely and allows the operator to “act”. I commented on Gizmodo when the first trailer came out that this droid could be built today except for the AI and power systems. This is way cheaper than CGI for a main character.
I think the real trick is offsetting the hemispheres vertically to travel along the incline of a slope while maintaining an upright posture. Yes, I’m building one too and a bit nervous about cease and desist because every bit of it is valuable intellectual property.
My assumption: the build elaborates on the principle shown in xkcd. 3 motors on omniwheels (not mecanum as in xkcd) in the base plus the magnet arm pivoting linkage with 3 more motors (two for pivoting plus turning). the head only needs 3 ball bearings (like ball point pen) and 3 magnets. Control should be possible with standard R/C equipment allowing nonlinear mixing of channels. I think coordinating two operators for 3 axes of body/head control each would be difficult. Maybe one operator with more advanced controls (3-axis joystick for body and head). embedding batteries into the shell for lights seems complicated (mechanically), but so do induction coils or slip contacts (arrangement). it would be preferable to have one power source only, though.
I think it’s much simpler than most people think. The large ball movements are similar to a Sphero. The head is probably magnetically coupled. Inside the head there is a motor to make it spin on its magnetic base. The head movements on top of the ball are done by having the magnetically coupled base move using a ball jointed radius arm controlled by two servo motors- this would allow the head to move independently of the large ball. Might just have to build one…
I’ve watched that presentation video a dozen times looking for key moments of inertia. The key moment that clearly gives away the inner works is at 1:10-1:14. That’s when to whole body simply rotates.. You’ll notice the head leads the rotation then the body catches up followed by the heads rotational correction. By observation this suggests the body is hollow with a inertial weight in lower half. This weight Prob driven via motors and electronics tho most likely the weight is the motors, electronics and batts. best guess would demonstrate that the internal mass is slowly ramped up in rotational speed then braked causing the body to catch up through simple controlled motor braking. this act also shows the head is linked to the internal mechanism via magnets or otherwise. because the head clearly rotates with the internal mass before the body catches up.
so it probably has altogether a wheel driven mass in the lower half of the body for both stabilizability and inertial force for ball rotation. As for head control there is probably centralized gimbals moving a arm with strong magnets attached. the key to it all is the gimbals and the head not weighing more than the mass in the lower half the body so the head can move with little to no inertial effect visible.
thats my two-cents..
+1 exactly my thinking as well.
Gawd the droids in the star wars universe suck. They can walk and fight and hack and repair and spy but half of them can’t have a simple ENGLISH (or Galactic or whatever language the humans speak in that show) voice chip. If they can stuff 6 bazillion languages into a walking humanoid robot (ie. C3PO) why can’t they stick a simple 10 language chip into EVERYTHING else?
Yep, got to love 80’s logic. Because this story is the future we must have AI and metal men. (people repair stuff so it must be easy for machines right?) But current computers can’t talk so lets give the bots a beep/boop dialect instead. Oh and they can’t update your calendar or send messages for you ’cause that’s too hard. (never mind that ARPA net or voice synthesizers are also from the 80’s…)
Here is the patent:
https://www.google.com/patents/US8269447
you win the comments
According to [Dirk’s] page, this was the basis of the Rezero robot http://rezero.ethz.ch/ rezero is a ball balancer. Still, it’s interesting that this sort of research has been going on at Disney for a long time.
It is a stupid piece of fiction and a lame design. Has no practical value.
You say that now, but when Skynet equips these with machineguns, lasers and shock prods…
at about 1:01 you can see what looks like a ball caster under the head.
http://i257.photobucket.com/albums/hh227/army_guy137/Untitled_zpsdej91oeb.jpg
Sorry about Vader on the right. lol. The screen shot takes across both of my monitors.
Ok the actual dinner assembly if the the head. There are omni wheels that come in contact with the ball. The wheels are painted in a magnetic paint. The ball is painting with a powdered metal of some sort to attract the wheels.. Other than that, it is similar to a segway balancing system. Thoughts?
Arguing that ‘this is just a pretty prop and not a real robot’ is far too pragmatic for this site, so I’m going to ignore all you boring realists and speculate away about how this could actually be achieved for a real world application. Because thinking like this makes life more fun. dex drako.
My guess is that it is very similar to the Randal Munroe sketch, but with the centre of mass of the drive system ABOVE the centre of the ball. Four omniwheels in a tetrahedron arrangement makes sense… This in effect would be a ball balancing robot but one that clings to the inside the ball, rather than sits on top. The head is likely magnetically coupled to the innards but I think it would need to be much lighter that the innards to achieve the dynamics observed.
The real question, is how are they going to make these things for the all important MERCHANDISING, you know they have already put thought into it!
I think people are over-thinking this one. Inside the ball there is a very tight fitting rc car like device with 4 or more wheels. They aren’t Omni wheels but just regular old wheels. Turning on and off various wheels is how it steers and a very heavy weight at the bottom keeps the ball stable and the rc assembly upright. There is a fully articulated boom arm attached to the top of the rc assembly with a magnet on the end. The head of the robot is just very light weight plastic with some lights and junk thrown in to make it look nice. There are ball bearings to make it roll smooth along the ball and the magnet inside manipulates it.
How does the head communicate with the body? It doesn’t. The blinky lights and what-not a a separate rc communication and battery pack and with modern control units you can control two devices at once.
I’m sure that’s not exactly how it’s done… but it’s close.
THANK YOU
Half these comments make my head hurt. It’s not too difficult to surmise how this works but the comments here are going on about ball balancing even after they know the head can tilt all around without making the sphere move. THIS ISN’T HOW BALL BALANCING BOTS WORK!
Also to those saying there are two robots working in tandem, that is overly complex, difficult to implement, and likely unreliable in practice.
All it takes is a hollow dome, some casters, a few RC blinky lights, and enough magnets so it can stay positionally locked to the internal boom.
Since people keep linking the project, earlier I left a comment on Xrobots YouTube and he replied that he started his version a while back, so he didn’t have the benefit of seeing it outside the trailer which I think has it doing nothing but rolling along. Now that we’ve seen it tilting it’s head and looking alert and attentive on-stage we know this isn’t a ball balancing bot.
I think the base is pretty much this reaction wheel type system here https://youtu.be/ML2UjOeiZDw, and the upper part is a separate driven device that balances on top.
Here is the TL;DW version https://youtu.be/OWkK-o4Vq-A. No “hamster in a ball” drive system derivative can match the torque and maneuverability.
A challenge for the people arguing about the magnets and some robot inside the ball: make a ball robot that can keep insides stable (so that the magnet can keep the head at the top) AND move freely 360 degrees in 3D to all directions (as that what you can witness with the ball).
All the internally driven ball robots I have yet seen have not achieved both. They are either stable inside, but limited to two axis movements (considering the ball surface) OR non-stable (like the toy ball robot you can steer with iPhone (cannot remember its name). I am not saying that it’s impossible, but it sure is difficult. If you just but RC car inside a ball, it will lack sideways rotation (strafe) and static rotation (around Z-axis).
By analyzing the movement of the video, I am betting on the wheels under the head driving the ball to be one factor in the design. There is existing videos of such impelmentations and they look very convincing, for example this one https://www.youtube.com/watch?v=dr5xdpLL58A
Those who argue that such robot cannot rotate back up when the ball is stationary. Yes, it can. It all depends on the friction and the torque the head puts to the ball. If the head moves slowly enough, it can move its position on top of the ball without moving the ball itself. Add more torque / spin wheels faster, and the friction under the ball breaks and the ball starts spinning.
Rotating the bottom ball can be done by braking one wheel. The two (or more) running wheel cause the momentum and the breaking wheel transfers it to the ball. Hence the slight drag.
Still, I would assume the bottom ball do actually have some control or internal stabilization, but I have hard times to believe stabilized magnet inside keeping the head in position -idea, since the ball truly moves in total freedom. If there’s magentism involved, I would say it’s the surface of the ball + electromagnetically controlled magnets in the head part..
I guess you didn’t see the post right after this one where someone used a sphero and a off the shelf super magnet he had lying around to make a working BB-8.
the answers is quite simple.
the ball moves in complete freedom because it’s little more then large hamster ball for the “robot” inside. the only connection between the ball and the bot is he friction at the two drive wheel (two because Disney likely used the sphero design). the magnets are connected to the bot so they always stay upright and the dome gets dragged over the ball.
all of this 10,000 times easier to do them what you’re saying
I think the sketch is good except the pivot point that moves the head would be at the centre of the ball.
Merchandise done:
http://makezine.com/projects/make-this-mini-star-wars-bb-8-ball-droid-with-a-hacked-sphero/
I cannot understand why there is a debate between drive mechanisms for this. The presenter in the video says BB-8 was only possible with the help of a company that Iger found – meaning Sphero.
BB-8 was built with help from Sphero.
It’s a Sphero.
Notice the way the head leans into the direction of travel? Same as this build, using a Sphero: https://www.behance.net/gallery/25464763/BB-8-Sphero-Droid
I’m guessing that there is some kind of friction/ inertia mechanism at play which is why the wheeled drive inside the ball doesn’t stay level to the ground but instead drifts back a bit, causing the head to move forward in the direction of travel (as you see in the Sphero video). I’d have thought it would act more like a hamster on a wheel: https://www.youtube.com/watch?v=fd8vl5LJoM8
The clever bit is the mechanism inside the ball to move the head around, though there must be some limitations to this design, as it would look better if the head stayed level with the ground when driving around…which should be possible with a good articulating head design. Maybe it is a coding challenge, not an engineering one?
Look here for further information
http://www.roborei.com/world/news/how-does-bb8-work-bb8-starwars-movies/
Here is the patent.
https://www.google.com/patents/US8269447
The patent is dated Mar 17, 2010. The xkcd comic “New Pet” is dated 2008. How is it not prior art that invalidates this patent?
Don’t think too complicated.. the goal of film makers is not to make a model that’s new technology, but to create something reliable, that’s looking good. I think there should be a weight in the ball, controlling the motion and the head can just move a bit to illustrate a movement control. The head is coupled with magnets, the mechnics, either in the head or in the body can set a relative position to the magnet. It’s easy, reliable and it’s capable to do fast movements. But it’s just an improvement for the actors and not used in any film scene.
Related; The Rotundus GroundBot
http://www.rotundus.se/
Of course it doesn’t have the cool balancing head…
Juvenal ewok with a magnet on a stick.
Circus trick, centuries old, dressed up for movies.
The dog/duck/monkey/pony/tiger/baby-elephant balancing on a ball trick.
Cover the critter [or complex assortment of servos, gyros, pitas, processors and motors] with a shell, give it a ball to balance on.
The best practical effect is always the simplest.
Nothing in the ball but air and enough wires to run a few LED’s.
watch this:
https://www.youtube.com/watch?v=n_6p-1J551Y
My two cents: inside the sphere sits one of these. (or similar tech)
With the 3 flywheels it can induce torque in all directions , including around the vertical.
Also, it can counteract the head overhanging whilst the ball is not moving.
In the head can be the ‘ balancing ball bot ‘ as stated above.
The movements are planned, so the head as well as the sphere know where thery’re heading and how fast and this way the balancing bot can lean in the direction of movement.
All this, or two black sticks out of sight and a really good puppeteer!
something went wrong here. I posted a link to a movie showing ‘cubli’.Instead, the balancing ball bot movie shows.
google it, it’s AWESOME.
cubli consists of 3 flywheels, gyro’s and accelerometers.
check it out, then reread my comment please.
I believe there are two separate systems working in tandem. There are A few key observations in the video
– there are times the entire bot (ball and head) rotate at the same time. (this indicates there is a mass rotating inside the ball)
-it appears the ball moves without the head requiring much radial displacement (the additional force for motion could be provided by a weighted drive motor in the ball)
-the head is capable of rotating independently of the ball
The first system is a weighted mass inside the ball which has wheels driving the ball’s motion. The second is the head, which is likely equipped with omniwheels. Furthermore, I believe the head and the ball’s drive section are coupled in some way or another- magnets being an obvious option. I think there is a rigid tether located between the ball’s centerpoint and the other end right below the head where the magnet is located. The arm would provide traction to the omniwheels on the head. With the omniwheels, the head could rotate independently, or the rigid tether could rotate itself with the magnets coupling the rotation.
Have you considered the posibility of using that technology for spherical segway?
Disney has a patent filed in 2010 for this robot. The patent has got to be invalid!!!
Check out correlated magnetics aka polymagnets; programmable magnets