
The cool thing about the droids of Star Wars is that they’re not that hard to recreate in real life. R2-D2 is a popular choice, but you can even build yourself a neat little BB-8 if you’re so inclined. [Piyush] has built a particularly compelling example that’s transparent, which lets you see the internals and how it all works.
The build makes creative use of a pair of Christmas ornaments. They are perhaps the cheapest and easiest way to source a clear plastic sphere. One serves as the “head”, while the other serves as the larger spherical body. Inside, an Arduino Pro Micro is running the show. It’s hooked up to a L293D motor driver which runs the drive motors and the reaction wheel motor which provides stability, while a separate MOSFET is on hand to run the gear motor which controls the head.
There’s also an HC-05 module for Bluetooth communication, and a BNO055 sensor for motion tracking and ensuring the robot stays the right way up. 3D printed components are used prodigiously to cram everything together tightly enough to fit. There’s even a printed charging base to juice up the little droid. Controlling the robot is as simple as using a smartphone with an app created in the MIT App Inventor.
If you’ve never built a spherical rolling robot before—and few of us have—this design is a great reference for your own work. We’ve seen a few BB-8s over the years, most of which dropped shortly after the movie was released. Continue reading “A Transparent BB-8 Build Using Christmas Ornaments”





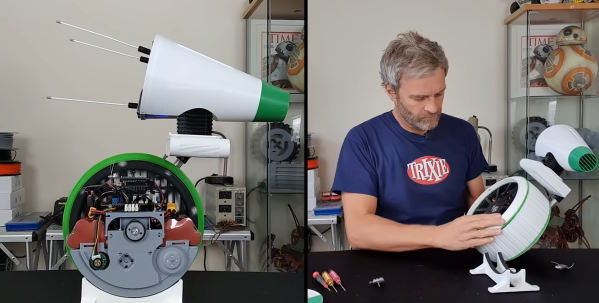
 D-O is effectively a two-wheeled self-balancing robot, with two thin drive wheels on the outer edges of the main body. A wide flexible tire covers the space between the two wheels, where the electronics are housed, without actually forming part of the drive mechanism. The main drive motors are a pair of geared DC motors with encoders to allow closed-loop control down to very slow speeds. The brains of the operation is an Arduino MKR-W1010 GET on a stack that consists of a motor driver, shield, IMU shields, and prototyping shield. [Matt] did discover a design error on the motor driver board, which caused the main power switching MOSFET to burst into flames from excessive gate voltage. Fortunately he was able to work around this by simply removing the blown MOSFET and bridging the connection with a wire.
D-O is effectively a two-wheeled self-balancing robot, with two thin drive wheels on the outer edges of the main body. A wide flexible tire covers the space between the two wheels, where the electronics are housed, without actually forming part of the drive mechanism. The main drive motors are a pair of geared DC motors with encoders to allow closed-loop control down to very slow speeds. The brains of the operation is an Arduino MKR-W1010 GET on a stack that consists of a motor driver, shield, IMU shields, and prototyping shield. [Matt] did discover a design error on the motor driver board, which caused the main power switching MOSFET to burst into flames from excessive gate voltage. Fortunately he was able to work around this by simply removing the blown MOSFET and bridging the connection with a wire.









