The cool thing about the droids of Star Wars is that they’re not that hard to recreate in real life. R2-D2 is a popular choice, but you can even build yourself a neat little BB-8 if you’re so inclined. [Piyush] has built a particularly compelling example that’s transparent, which lets you see the internals and how it all works.
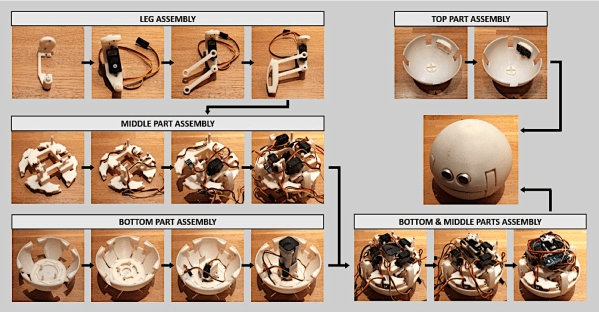
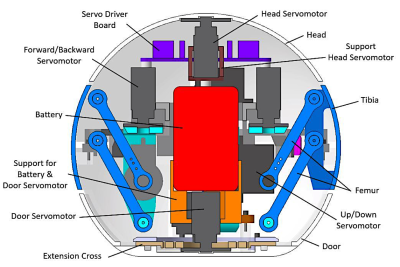
The build makes creative use of a pair of Christmas ornaments. They are perhaps the cheapest and easiest way to source a clear plastic sphere. One serves as the “head”, while the other serves as the larger spherical body. Inside, an Arduino Pro Micro is running the show. It’s hooked up to a L293D motor driver which runs the drive motors and the reaction wheel motor which provides stability, while a separate MOSFET is on hand to run the gear motor which controls the head.
There’s also an HC-05 module for Bluetooth communication, and a BNO055 sensor for motion tracking and ensuring the robot stays the right way up. 3D printed components are used prodigiously to cram everything together tightly enough to fit. There’s even a printed charging base to juice up the little droid. Controlling the robot is as simple as using a smartphone with an app created in the MIT App Inventor.
If you’ve never built a spherical rolling robot before—and few of us have—this design is a great reference for your own work. We’ve seen a few BB-8s over the years, most of which dropped shortly after the movie was released. Continue reading “A Transparent BB-8 Build Using Christmas Ornaments”