For the last few years now, the 3D printing community has been searching for a groundbreaking application for out little boxes of plastic squirting goodness. On of the most interesting applications the community has stumbled upon is prosthetics.
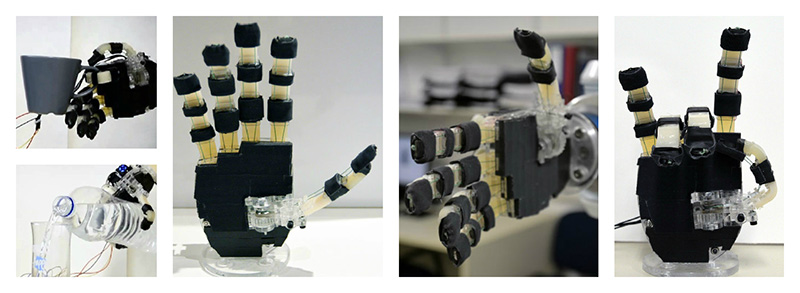
There have been a lot of people warming up their 3D printers and laser cutters to make prosthetic limbs in recent years. For [OpenBionics]’ entry for The Hackaday Prize, they’re building a prosthetic hand that costs less than $200, weighs less than 300 grams, and can be easily fabricated with 3D printers and laser cutters.
The human hand is the most complex end-effector on the planet, and emulating its range of motion is a difficult task. Still, the [OpenBionics] team is working hard to properly emulate a thumb with three degrees of freedom, putting 144 different grasps on the hand, and making their hand useful with soft fingertips.
Even with all this capability, [OpenBionic]’s robotic hand – motors and all – is about the same size as a normal human hand. That’s incredible, especially when you consider the motors for your hand – muscles – are all in your arm.
The team has put together a video demoing the capabilities of their hand. It’s somewhat remarkable, and able to do everything from lift a coffee cup to holding a pen. You can check that video out below.














Finally! Someone designing a hand who has actually looked closely at the anatomy of a human hand. Note the difference in how this hand grips various objects VS others that have all the fingers the same length and all the finger joints aligned on the same axes.
Yes! now robots can make rock & roll / devil horns. As far as I’m concerned, the robotics innovation race is over.
It’s an ancient hand sign to ward off the “evil eye”, not devil horns.
LOL, without giving too much attention to the initial titles in the video, it was obviously a Greek team since there is a frappe glass in the video :-)
Without being able to control each finger individually (without a change in “mechanical setup” requiring another hand WTF?, and also have a feedback from pressure sensor), it’ll stay in my opinion a prothesis-like object. The achievement is great, but I’m waiting for the next step.
This hand operates with flexures joints at fingers, so it has passive compliance that allows for large joint deflections and can ensure low contact forces, thus minimizing disturbance or damage to objects during the first phases of acquisition and in impacts, where active stiffness control often fails. Moreover, it demands human-in-the-loop but in an intuitive and fast way which means that you don’t need any training of the system or further sensors. We are working on a project in order to implement a different version where fingers will move individually with one servo motor.
Very nice – I love tendon driven hands. We covered Yale’s open hand project here: http://hackaday.com/2015/02/25/openhand-combines-3d-printing-with-urethane-casting/
“The human hand is the most complex end-effector on the planet” I agree – re-engineering that is amazing – I think an octopus might be next in line.
“for out little boxes”
“On of the most”
“For [OpenBionics]’ entry” and then later “[OpenBionic]’s robotic hand”
Are we done hiring editors? Is this what we have come to accept from authors these days?
ON the MOST. Either be a lazy reporter and write out ‘ONE of the MOST’ and be on par with Gawker and cosmo, which is retarded of itself, or decide ‘one of the more…’ or ‘The most…’. Meh my designed hand is all 3d printed, supported with something something and lacks motors. When it works I’ll build the free website to post my projects then bug you guys about it.
That is a very good hand. 1.5 litre(kilo) is a nice grip.
A mechanical linkage to lock the joints using a servo, instead of by hand, would be a nice improvement. But the single actuator is perfect for prosthetic use.
Well done.
You can find more about our project in the following links:
OpenBionics website: http://www.openbionics.org/
Hackaday project: https://hackaday.io/project/4745-openbionics-affordable-prosthetic-hands