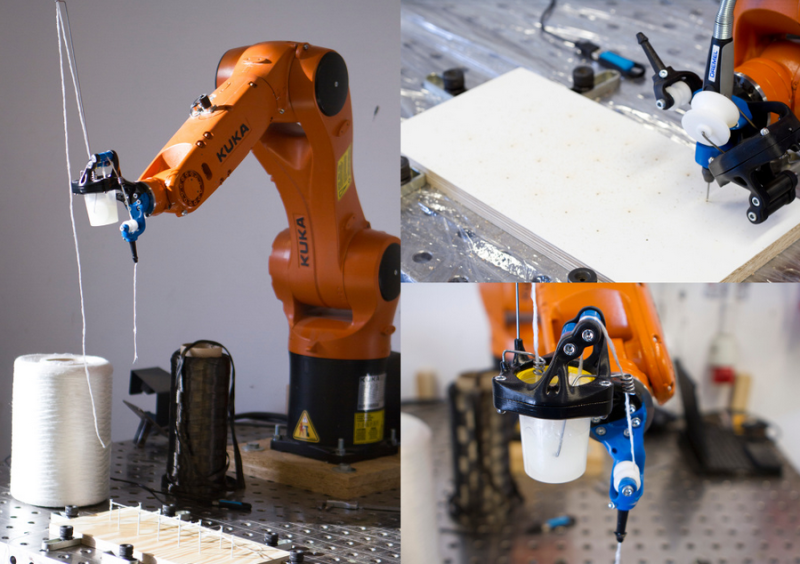
Oh to have a 6-axis robot arm to play with… For [Basia Dzaman’s] final graduation project for School of Form, she designed and 3D printed an end effect tool for an industrial KUKA robot — for weaving carbon fiber.
Through an iterative design process, she developed many prototypes of the tool until the one you see above. It’s capable of holding a Dremel multi tool which can be used to drill into a work surface for installing pegs which make up the custom weaving jig. The pegs (nails) are then installed by hand so that the robot can thread carbon fiber — fed through an epoxy bath as it is dispensed — onto the jig. In the example, she shows a traditional Polish handcraft called Snutki (a type of stitching), wrapping the carbon fiber in patterns around the pegs. Once the epoxy cures, a strong structure can be removed.
Remember the 6-axis robot that can 3D print in metal, and is currently working on 3D printing a bridge? [Basia’s] design could do similar things, for a completely different industry. You can check out [Basia]’s video for the project below.














I don’t get what’s the point. Very limited use case despite gross overengineering: no planes, no 3D objects. Awful final product quality, must be nowhere close mechanically to fiberglass molded in a controllable process.
This without compression/vacuum voids are inevitable. Its still a cool project and an even cooler brobot.
NASA build fuel tanks that way…
https://en.wikipedia.org/wiki/Lockheed_Martin_X-33 you mean this composite tank that failed during testing? Maybe they should stop building tanks that way…
Seriously they put the entire thing in a bag vacuum it and then bake it to cure the resin, it would be foolish not to, without vacuum there will be voids formed that weaken the composite, https://youtu.be/jc52ssQ65cU this is the end step.
If you must be critical, fault her PI/PM for releasing this info prior to having more diverse and complex physical demostraters…but for an undergrad, THIS IS INCREDIBLY GOOD WORK! It was probably released prior to her graduation to help her prospects of grad school
“No 3D objects…” Well, because 2D is easy to start with. Grasping for the highest-hanging fruit usually puts you flat on your face. Simultaneous use of two serial arms opens up many more doors in this realm (and yes, costs at least twice as much).
The KUKA featured here posesses enough dof to apply subtractive manufacturing to both:
A) create more-complex “molds” or nail-based scaffolds for windings, and
B) post-processing the workpiece for a decent finish and dimensional accuracy.
Sure it’s costly value-added processing, but gets you closer to highly dimensional-toleranced parts, like aerospace/autoclave parts.
As far as mechanical properties and performance…meh, you’re not exactly correct.
1) Because the fiber tow is being drawn into tension, the excess resin is squeeze out. Thus, the resin-rich zones are outside of the filament boundaries.
2) So again: subtractive mfg. could remove the excess resin.
3) Apply better resin-volume-fraction control when wetting the tow, though the tool must be kept wet to prevent starving the tow or resin.
4) Moreover, this was a single-tow approach. If a textile is woven, program the KUKA to use a squeegee to wipe off excess resin.
Sorry for the rant. I’m a PhD student with years of research/fabrication experience in composite materials engineering and additive manufacturing research. I’m liking what I’m seeing in this video.
But… why?
Learning something(s)? Maybe you should ask yourself, why not.
Since you’re not putting the Kuka arm to good use, can I have it?
1) Using technology in ways that haven’t been used before
2) it works
Those things for me already mean it’s a hack, hence worthy of being done.
Useful applications (just hypothesising, I’m not an expert): weaving more complex net-like structures in any direction possible, as long as the kuka robot can still move around.
Just throwing that in here, sometimes a thread gets completely smothered from the start from a few negative comments.
I agree, and share your concern about bandwagon effect with negativity.
The finished “art” woven product was lost on me(but then again: I’m not from Poland), but I can appreciate the skill necessary to combine the variety of tools/software she was working with in creative new ways. The Dremel tool + Kuka arm CNC mill could be described as “overengineered” or a square peg/round hole scenerio, but I personally find the idea of a dremel end effector for a robot arm to be a fairly interesting approach to 6dof(or more) subtractive manufacturing.
Most importantly, her design for a composite “spool gun” speaks for itself. The design of it is shockingly sophisticated considering it was made in Rhino(vs Solidworks or a similar CAD package where things fastener holes are dumbed down via a wizard).
This composite “spool gun” concept demonstrates a lot of potential, and although some improvements could be made(wipers to prevent the epoxy from gobbing + calibrated peristalic pumps instead of a fixed volume reservoir) I’m most impressed with the Inverse kinematics. I don’t know how she was programming the CAM package, but the combination of manufacturing engineering, software engineering, and mechanical engineering left me VERY impressed.
Pretty sure factory robot arms have inverse kinematics built into the controller. Afik, you just pick a coordinate system to work in and send G-code or something similar. Which is cool since used robot arms are relatively cheap. (similar price to a mill or lathe.)
I think it’d be neat to combine this robot with a UV cure resin and lasers to cure the fiber as it’s dispensed. (or a light pipe needle) Then you could truly weave 3D structures from carbon-fiber. (figuring out how to program tool paths would be “fun”!)
I agree. I can see a lot of applications for this, especially if a second robot acting in another axis is involved.
it could weave a a car/robot/drone chassis without interruption of the material.
Still needs a jig.
What did she spray on the robot?
Could be silicon to make sure any wayward globs of epoxy doesn’t stick to the arm. It would be a crime to mess that arm up that way.
https://www.youtube.com/watch?v=l4DLr8qHliI Not sure if the machine in this uses some form to give the weave structure but sure makes expensive cars.
freeform filament winding… I think it has potential, driveshafts are filament wound from carbon filament for instance.
However, the shafts are wound onto a die, so the normal way it’s being done now is faster, more efficient and the part is stronger…this might have some advantage when winding prototypes of a very complex object with overhangs, that truly needs all the axis it can get.
True freeforming requires a complex 3D loom, like the one Josh posted, as the fibers have to be quite tensioned to form a strong part…
Can this be ported over to a CNC machine? I realize it lacks all the axes of the robot, but minor changes in the movement and I could be cranking out tiny carpets!
My suggestion for a use: wiring looms.
When space becomes important, the little plastic locks on panduit straps (zip locks) can catch, and manufacturers return to “Lacing” – usually with waxed string, rather than resin coated fibreglass.
Making a good wiring loom is time consuming. Using this machine, in this manner, is a possible option.
Finally, a new way to make Polish Submarine doors.
Is this a Kuka commercial? Girl playing with robot arm | target audience: HaD nerds :D
You need two arms to take this to the next step because the thread needs to be on a needle so that topologically true knots can be created. One robot arm can’t pass through a loop but a needle can and another arm can hold or grab it on the other side.
I hope she takes it further.
I want the robot. Any idea how much?