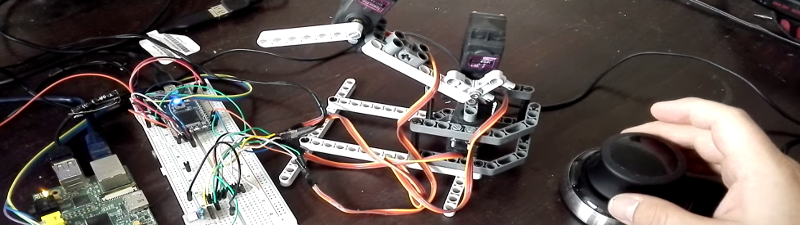
You’ve built the perfect robotic arm. How do you drive it? If you are [angrymop] you interface a 3D mouse from 3DConnexion via a few microcontroller boards. The Spacenavigator mouse is a staple anywhere professional CAD people are working, and it looks like it is a natural fit for a robot arm.
According to [angrymop], the Raspberry Pi can read the mouse’s commands via /dev/hidraw (that’s the raw human interface device). Each motion generates two lines of output. Each line has a unique identifying byte and values corresponding to the axis positions.
The Raspberry Pi then uses an SPI interface to talk to an ARM microcontroller and that drives the servos. The arm (the robot arm, not the processor) itself is well done, made from Lego Technic parts and common RC servos. Not that this is the most amazing thing we’ve ever seen built from Technic, but it is still pretty impressive.
You have to wonder if other 3D controllers might be useful for controlling robot arms or how the Spacenavigator would do controlling a bigger, more capable arm. Then again, maybe this arm would be the right size to build something inspired by Escher.














impressive one !!
Actually that’s just how you control the big arms.
Controller for KUKA arms usually have a spacemouse attached that can be used alongside buttons for positioning the thing.
Orange knob here: http://www.robotwelding.co.uk/KUKA%20smartpad.jpg
Actually, the “orange” knob is red, and it’s the e-stop button. The 6D mouse is the black cylinder embedded in the right side. Source: https://www.youtube.com/watch?v=4gDjgomANC4
That thing is pretty sweet, though. I wonder if one could access the /dev/hidraw device in an Android tablet and build something like this… I guess you could just use a Pi and a small TFT touch-screen. The software/UI is probably the most interesting part, though.
Derp… I didn’t notice the mouse was orange in that picture you linked to until after I found pictures with a black/gray one… Anyway, I still want to make a pendant like that for a CNC machine or DIY robot arm (something with a little more lifting power than the Lego one in the article ;)
LMFAO this isnt impressive to be honest. He uses a PI which is basically a linux pc … use a USB Host IC and ill be impressed.
Not to mention he could’ve gotten away with a dozen of 555s, especially for bit-banging USB’s differential lines. I mean, if it’s not broken, fix it until it is, right?
But seriously, it’s not even that hard to make it. Basically, if he’s parsing raw HID responses, he’s not too far away from porting it to a MCU. Now the question is – should he be doing it purely because somebody on Hackaday isn’t content with his work.
See, your comment is not even impressive, to be honest. You have written just three sentences, with the punctuation and capital letters messed up. Make it at least 30 sentences and he’ll be impressed enough to go and remake his project.
Lmao at least i didnt waste people time with a paragraph of garbage. I make my statements straight and to the point. You dont like it .. fine its your opinion. Enjoy your day :)
You did waste people time. Yeah, maybe for some people this isn’t impressive (it isn’t for me). But your comment sounded condescending (you suggested he shouldn’t even bother), was orders of magnitude less impressive and may discourage people from doing more thing like this, or go further with such hacks, so it’s actually harmful. It wasy maybe straight and to the point, but completely unnecessary and you should think next time you would like to say that you’re not impressed.
Incorrect buddy… i suggested that it wasnt impressive… in the fact that it uses a PC. I didnt say “This blows, this isnt worthy of HAD or that it is not a hack” Whats in the word ASSUME ? ASS, so stop being one and chill out. I gave my opinion on the matter and i stand by it. You dont like it oh well, there are plenty of things you will see and not like, its called life. Enjoy it buddy
“See, your comment is not even impressive, to be honest. You have written just three sentences, with the punctuation and capital letters messed up. Make it at least 30 sentences and he’ll be impressed enough to go and remake his project.”
I don’t think atomsoft appreciated this part as much as I did.
atomsoft, would you call this ‘hack’ a failure or a success?
“You’re not a failure because you don’t make it, you’re a success because you tried.”
You do realize you are an asshole – right? And you sell stuff in the opensource\hacker community?
Gross.
Lol im an asshole… for having an opinion and speaking my mind? My products speak for themselves. That has nothing to do with this but ok lol
You are wrong. I will think twice before ever purchasing anything from you.. Because you a an asshole.
Lmao that’s fine. I dont sell things for a living. It’s a side hobby. Im an electrician by day. i make things for myself and the extras i sell. If there is a demand i make more. So even if my store fails i dont lose. Im not an asshole to be honest.. just able to defend myself. If you made a comment you thought to be accurate and true and defend it you would be am asshole to someone else. .. thats how the world works. Im not upset or fighting. Just wanted to let you know i still don’t consider you to be an ass because i know is your opinion and thats fine by me.
The use of HID and computer ISNT EVEN WHAT IS UNIMPRESSIVE ABOUT THIS.
It is the lack of 1:1 use of spacemouse axis\DOF to robot arm kinematics.
This should have at least 1 more joint and utilize the actual features of the spacemouse.
This could be done with a regular mouse – but alas, you are going on about HID vs micro-controller – LIKE THAT MATTERS|?! Its the control theory and human machine interactions that matter.
But you don’t know anything, do you?
Obviously not lol
It would be a good educational project for schools.