We use CAD packages in our 3D work, and it’s likely that many of us have become annoyed by the limitations of controlling the view of a 3D object using a 2D interface, our mouse. Joystick-like 3D controllers exist for this purpose, but [David Liu] found them inconvenient. He tried a trackball, but that didn’t improve matters. His response was to take the trackball and change the way it controlled the software, turning it from the equivalent of a ball rolling over a surface to a ball representing the object on the screen itself. He can turn and rotate the object intuitively just by moving the ball.
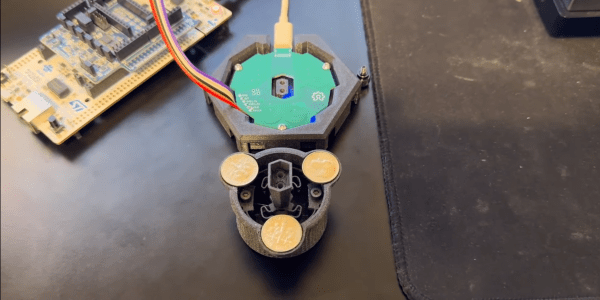
He started with a Kensington off-the-shelf trackball and adapted its electronics and handy twin optical sensors such that it worked in the required fashion. There was a lot of iterating and tuning to get the control feeling right, but he’s ended up with a peripheral that replaces both mouse and 3D joystick, and leaves the other hand free for those keyboard shortcuts.