Just because LEGO Technic is technically a toy doesn’t mean that you cannot do solid engineering with it, like building air-powered engines. After first building a simple air-powered piston engine, this time around [Jamie’s Brick Jams] sought to not only optimize the engine, but also build a clutch and something to power with said engine.

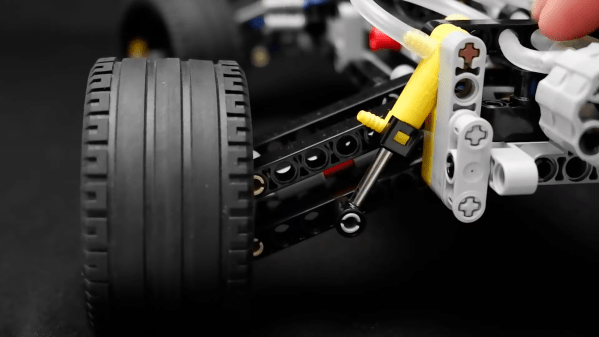
The piston head is one of the handful of 3D printed parts, with the new design featuring twin rubber o-rings as a seal instead of a single big one as in the old design. This incidentally matches the multiple seal rings on an internal combustion engine’s pistons, probably for similar blow-by related reasons. The air hose diameter was also increased from 2 to 3 mm to give the engine a larger volume of air to work with, which along with a new flywheel gave a lot more torque. Next the piston rod length was optimized.
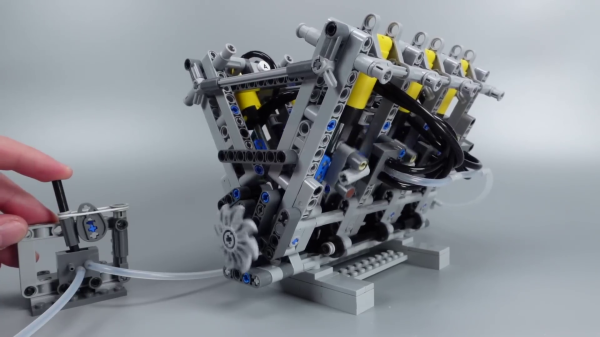
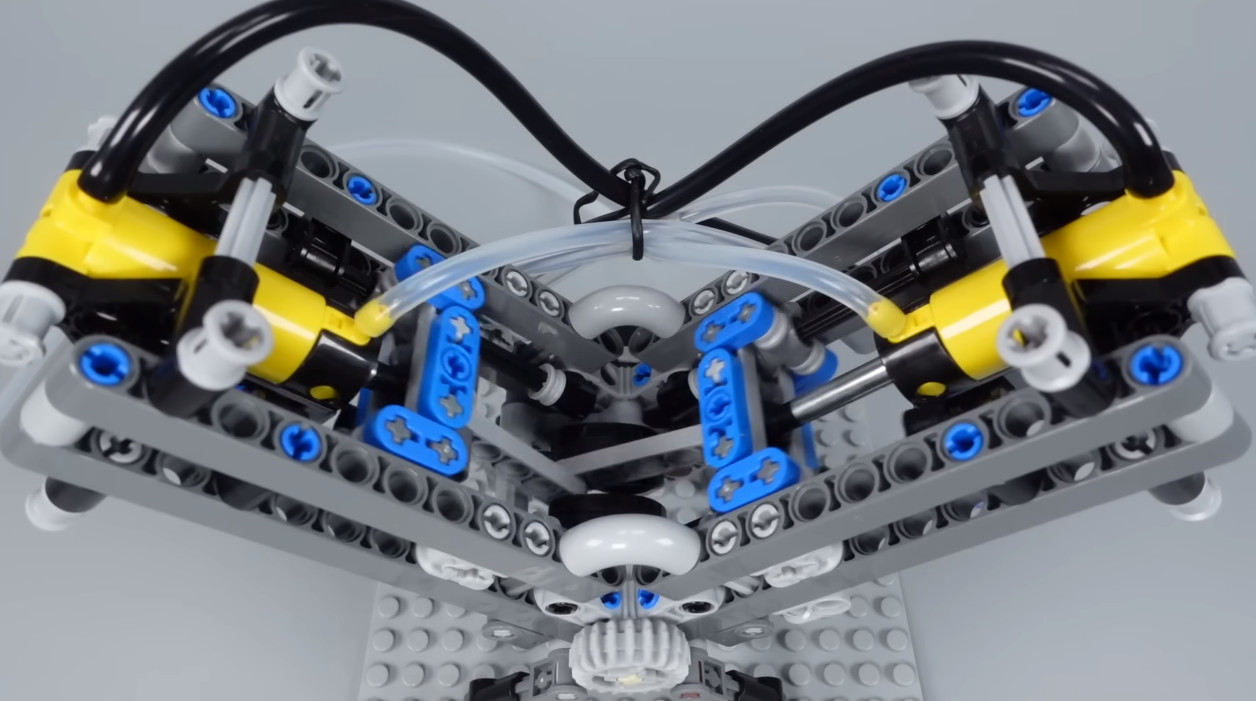
The final radial 4-piston engine turns out to work pretty well, with the clutch engaging smoothly. This was used to drive a DIY generator that turned out to produce about 3 Watt of usable power in its final configuration at 6 V, though it’s admittedly a rather crude generator that could be further optimized. When trying a twin-piston configuration with the highest air pressure before air hoses began to pop off, it hit a dizzying 14,600 RPM.
These aren’t half bad results for some LEGO Technic together with some 3D printed bits, rubber o-rings and some lube.
Continue reading “Making The Fastest LEGO Technic Air-Powered Engine”