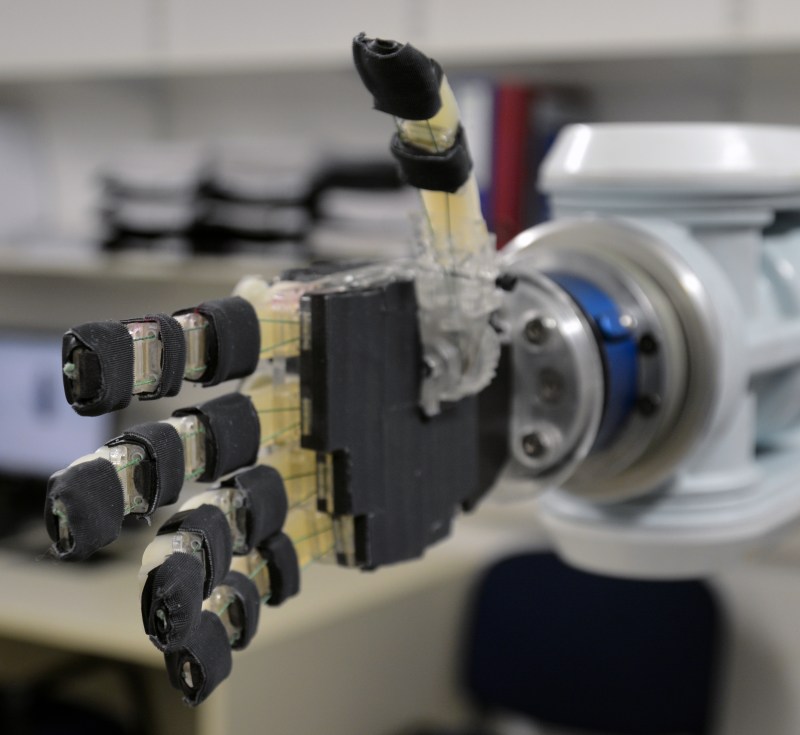
The human hand is an amazing machine, and duplicating even a fraction of its abilities in a prosthetic is a daunting task. Flexible anthropomorphic prosthetics can reach tens of thousands of dollars and are beyond the means of many of the people who need them. So imagine the impact a $200USD prosthetic hand could have.
For such a low, low price you might expect a simple hook or pincer grip hand, but the OpenBionics initiative designed their hand from the outset to mimic the human hand as much as possible. The fingers are Plexiglas with silicone knuckles that are flexed by tendon cables running in sheaths and extended by energy stored in elastomeric material running along their dorsal aspects. Each finger can be selectively locked in place using a differential based on the whiffletree mechanism, resulting in 16 combinations of finger positions with only a single motor. Combined with 9 unique thumb positions, 144 unique grasp are possible with the open source hand built from hardware store and 3D printed parts. Stay tuned for a video of the hand in action after the break.
3D printing is beginning to prove it’s the next big thing in prosthetics. Hackers are coming up with all kinds of static artificial hands, from the elegant to super-hero themed. Maybe the mechanism that OpenBionics has come up with will find its way into these hands – after all, it is an open source project.














It must be noted that we have tried different materials (Plexiglas, ABS etc.) and that our design can be replicated using either laser cutters or 3D printers. Stay tuned for more logs coming tomorrow.
The video looks amazing. It looks useful already.
Thanks Laszlo. We have many updates to share with the community. Stay tuned!
Will the locking mechanisms eventually be electrically actuated?
Indeed, we plan to have an electrically actuated version. After all we focus on both robot and prosthetic hands.
Nice! Another useful link might be the http://hackaday.com/2015/02/25/openhand-combines-3d-printing-with-urethane-casting/
Thanks for the link George! Actually one of us is currently a Post Doctoral associate in this lab. These guys are great!
Interesting. My first thought was that the manual locking mechanism kinda defeats the purpose of the prosthesis, but then realized that for someone needing only a single device, with at least some use of the other side, it would not be much of a hindrance. If the locking mech can be operated with another one of these, then even that concern is minimal.
I am curious about automatic locking, as I see it a benefit to use in a lot of ways, but don’t know if the additional mechanism, cost, and control issues (human interface– a single channel is straightforward. Multiple parallel is much more difficult) make it impractical.
Hi enl! Indeed, we are in the process of developing a version with automatic locking. The extra cost and weigh can be minimal and there are clever solutions to minimize the control effort. Stay tuned for more!
Whiffletree or whippletree?
Looks like both are correct… never mind.
Yes you are right!
Talking of open source and prosthetic, did you know the U.S. government’s National Institute of Health (NIH) has a free library of models for 3D printing? http://3dprint.nih.gov/collections/prosthetics
Yes we know the work of e-NABLE and this repository and we plan to send them also our prosthetic hands to be included. We only need to finish with the development and prepare the required tutorials.
I wasn’t specifically targeting you with my comment, but it’s nice to hear you plan to make it available because to me it seem a good thing to have a central repository of such things, and one that is also available worldwide.
Although, actually, now that the ISS has a 3D printer I should say solar-system-wide I guess.
Although the very best thing in my personal opinion is to have redundancy and have models mirrored at many places. Like the original concept of the internet but which now turned to the opposite where everything is centralized and thus vulnerable. But that’s another discussion.
We completely agree!