Robot arms are cool, and to judge from the SCARA arms and old Heathkit robots tucked away in a cupboard of every computer science department in every university in the world, they’re still remarkably educational. You can learn a lot about control systems with a robot arm, or you could build a clone of the old Radio Shack Armatron; either way, you’re doing something very cool. Right now, there aren’t many educational robot arms available, and the ones you can get are tiny. For [Jonathan]’s Hackaday Prize project, he’s building a low-cost robot arm with a one meter reach.
There’s a reason you won’t find many large, low-cost robot arms: the square cube law. An ant can carry many times its own body weight, but if you scaled that ant up to the size of a human, its legs couldn’t support itself. Likewise, a small, handheld robot arm will work perfectly well with hobby servos, but scaling this up requires big heavy stepper motors.
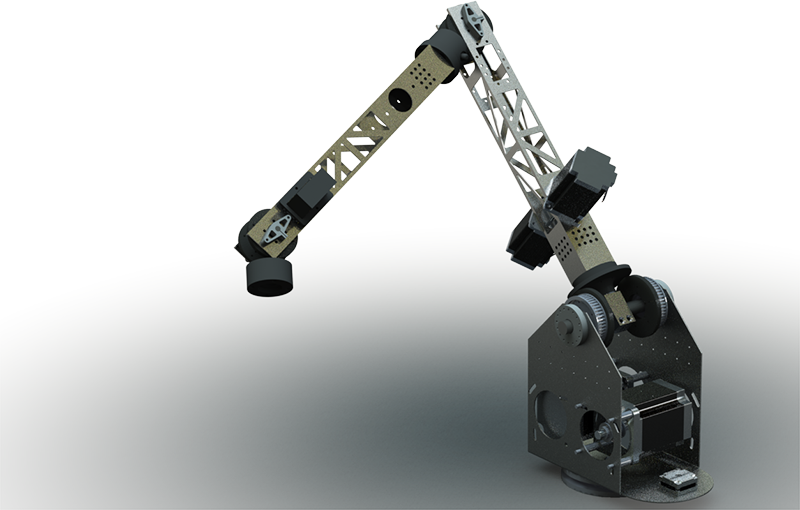
To cut down on the weight a bit, [Jonathan] is using very large stepper motors on the base – NEMA 34s – with smaller steppers going up the length of the arm. He’s also doing something nearly unheard of in The Hackaday Prize: design for assembly. [Jonathan] got a little tired of tapping threads, and is now moving over to tapped inserts and is looking for a better way to bolt the motors to the frame. All in all, it’s a great entry for The Hackaday Prize and is already one of the Prize’s finalists.


















Tapped inserts are great! At my job a plasma cuts out a hex hole and an insert goes in and it is crimped with an air tool. 20 seconds, done. Threaded inserts are great but can be pulled out with relatively little force if it’s from an extreme angle. Four inserts is plenty!
This is not the company we use, but same idea.
http://aerobolt.com.au/products/threaded-inserts/hex-nutsert
.
Are there any hydraulically actuated robot arms? I’ve seen excavator operators do amazing things but obviously the fewer D’sOF limit capabilities.
Closing the loop on the hydraulics is done by the operator. The more skilled he is, the better the capabilities. I’m involved in an ongoing closed loop position/speed control. The cost of equipment gets very high, very quickly. It’s non-trivial to make something fast and accurate, not to mention safe. …and then build it down to a price. Which is probably why you won’t see many of them.
There is a bigger problem with hydraulics (other than the hot, messy hydraulic fluid). Excavators and other hydraulic heavy machinery use just simple open/close valves (which is why operators as you say are very important). They are not proportional.
For a robot arm, you can use hydraulics but you need to use real servo valves which are very expensive (500-1000$ each minimum, you need two per axis). There isn’t much market for these other than in aerospace or military which is why the cost is prohibitive.
Boston dynamics makes the best (Apparently) now but obviously do not sell them ;)
I wouldn’t call those valves ‘simple’, but from your perspective they definitely are! Yeah, the control loop would be a completely different system. There are not many advantages to a hydraulic robot arm now that I have really thought about it.
Very nice Twitter btw!
There are digital proportional valves, which can be a combination of a number of different size valves and pulse modulation.
Hi Brian, Jon here from YARRM. Thanks for the article!!
I’d like to clarify a few things… (maybe you could insert into the article)?
First the reason for normal robot arms to be so expensive is that they rely on joint accuracy (positioning and feedback – thus rigidity and encoders) which can be very expensive. This usually consists of a DC brushless or AC motor with encoder feedback ($), harmonic drive ($$$) and cross-roller bearings ($$$). Obviously my robot arm will not be as stiff and so I will use visual servoing (open source “VISP” platform) with a camera at the end effector.
Second, by using steppers instead of DC feedback motors I can allow slip as the steppers act like electromagnetic clutches. This give intrinsically safe collaborative robots – if the arm hits you, it will slip instead of drive to drive through you.
Third, all joints (other than the base rotation) work in pairs. Each joint is in effect a friction-drive differential, this allow you to maintain again a human-safe robot and at the same time removes the need to expensive metalling bevel/miter gears.
I’d be happy to answer any more questions…
Easier to tap the holes with a drill
The problem I have is that when speed-tapping it is difficult to get the hole perfectly perpendicular. Any tips?
Whether hand- or power-tapping you should use a “tap guide” or “tap block,” which you can buy for $25 or so. Or take a slice of some scrap metal you have around and drill a hole for each size of screw you need using a close-fit drill (use your drill press, obvs.). The point is to have a perpendicular hole to act as a guide when starting the tap.
As it happens, I’m also working on a stepper-based PUMA-type arm with some similar goals, though my current design is pretty different from yours–see https://hackaday.io/project/2771-open-source-6-axis-robotic-arm for more.
^This
1000s This.
Make your own block though.