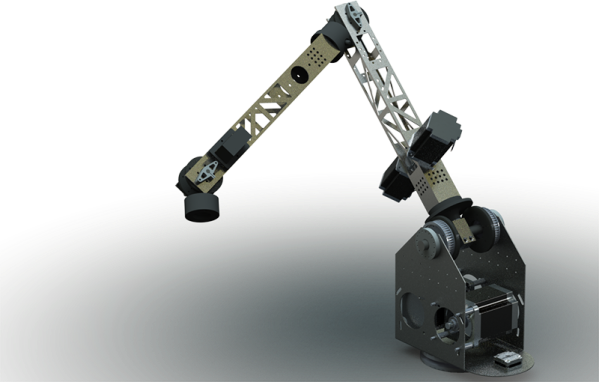
Robot arms are cool, and to judge from the SCARA arms and old Heathkit robots tucked away in a cupboard of every computer science department in every university in the world, they’re still remarkably educational. You can learn a lot about control systems with a robot arm, or you could build a clone of the old Radio Shack Armatron; either way, you’re doing something very cool. Right now, there aren’t many educational robot arms available, and the ones you can get are tiny. For [Jonathan]’s Hackaday Prize project, he’s building a low-cost robot arm with a one meter reach.
There’s a reason you won’t find many large, low-cost robot arms: the square cube law. An ant can carry many times its own body weight, but if you scaled that ant up to the size of a human, its legs couldn’t support itself. Likewise, a small, handheld robot arm will work perfectly well with hobby servos, but scaling this up requires big heavy stepper motors.
Continue reading “Hackaday Prize Entry: A Low-Cost Robot Arm”





 I had the idea for this project a while ago after watching Avengers: Age of Ultron.
I had the idea for this project a while ago after watching Avengers: Age of Ultron.








