
For all their joking about “reinventing the wheel”, the team behind Ourobot made a very cool robot (German, automatic translation here). The team, at the University of Applied Sciences in “Bielefeld, Germany“, built their wheel out of twelve segments, each with its own servo motor, a 3D-printed case, and a pressure sensor mounted on the outside of the wheel. The latter, plus some clever programming, allows the robot wheel to vary its circular gate and climb up over obstacles automatically.
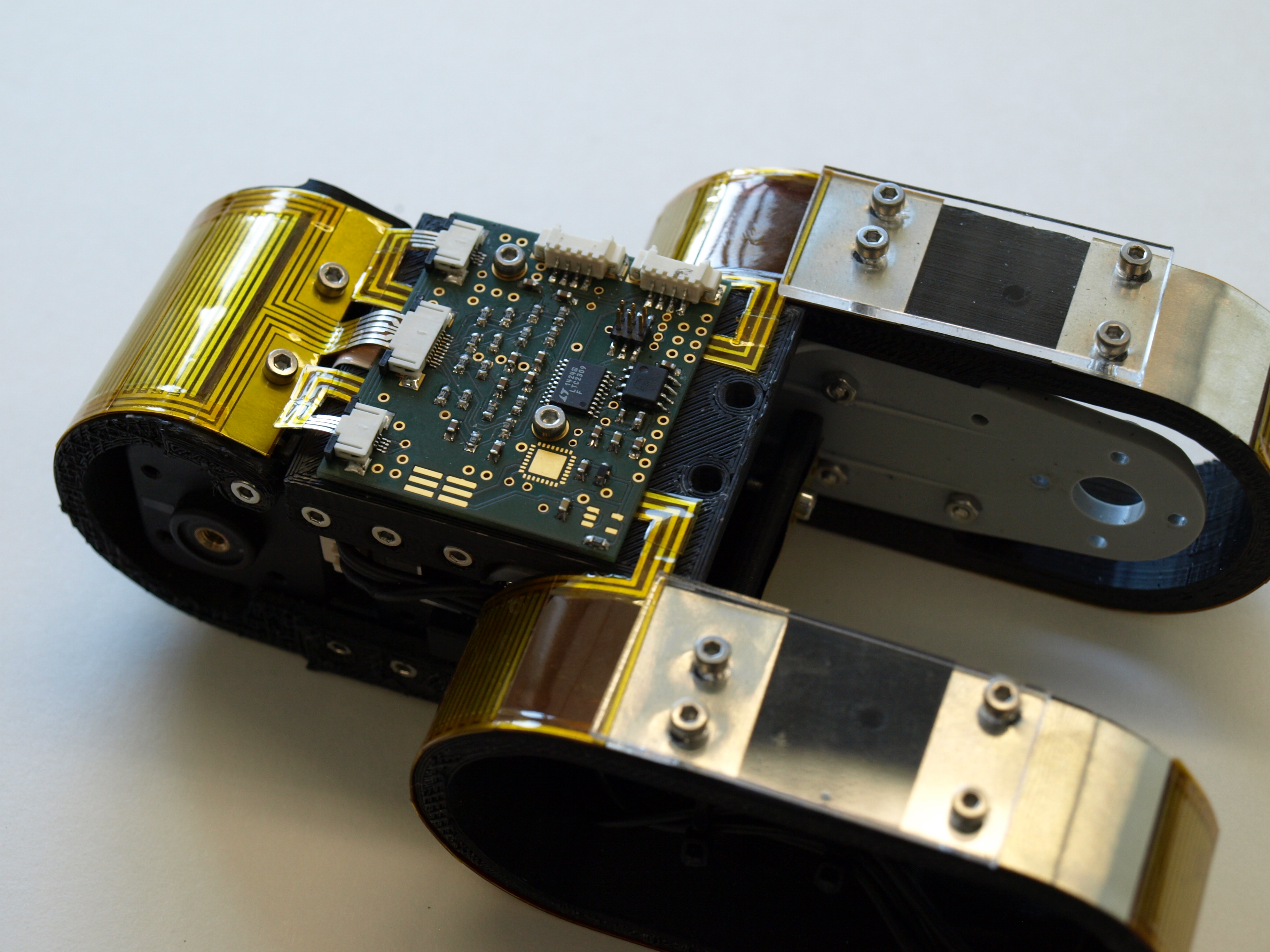
There are a bunch of interesting constraints in designing the control for this bot. The tracks on the ground, naturally, have to adjust their relative angles so that they lie each flat on the surface, even if that surface isn’t itself flat or level. The segments in the air are unconstrained, but the sum of all the servos’ interior angles has to add up to 1800 degrees, and these angles control where its center of gravity is.
Our head is spinning. The paper, “OUROBOT – A Self-Propelled Continuous-Track-Robot for Rugged Terrain” is unfortunately behind the IEEE paywall, but goes into detail if you can find it.
They’ve still got some bugs to work out in the odometry. Something in one of their assumptions about the segments not moving on the ground doesn’t hold in practice — most likely due to the compressible foam pressure sensors — so the robot thinks it is always going downhill. And it can’t turn yet, of course. But they’re working on that for version 2.0.
The bot was also made with refreshingly obtainable parts (quality hobby servos and 3D-printed frames) and using hobbyist-friendly procedures. Even the flex-PCBs were printed in-house using wax-ink resist. Top that off with the strangest mode of locomotion that we’ve seen since Cubli, and the temptation to try to build one is almost irresistable. Great work!














So how long until we can get it on a self balancing device (segway) and use it to ride up and down stairs?
https://www.youtube.com/watch?v=e9RixS4P8ao
Ain’t much easier to use it as a pogo stick? Those tires look beefy so they should be able to take the bouncing easily.
We need some actual pogo-bots instead.
http://giphy.com/gifs/extreme-pogo-3mvAKBQ3QOtA4
It’s like a lighthouse in the desert.
What?
There exist deserts that abut oceans, and have lighthouses for good reason.
Can you please give me coordinates?
http://www.amusingplanet.com/2013/04/where-namib-desert-meets-sea.html
That is a beautiful one, thanks!
For example… 36.357662, 25.357024
Ohh, and google street view goes almost right up to the lighthouse.
Coordinates I will not.
Several interesting ones to look up though…
Rubjerg Knude lighthouse
https://massimilianoturci.com/2013/09/12/epoc-lighthouse/
Remember, a desert doesn’t have to look like the Sahara. ;)
Hmmm, I was thinking king more…. brilliant but useless.
So students in Germany are learning robotics, while in the US they are learning about “diversity.”
thank you for your completely irrelevant and ignorant post
Interesting… it reminds me of the smart wheels in Snowcrash.
That was my thought also, although IIRC they were based on telescoping around the hub. The math for Wheel 3.0 makes my head hurt
Someone needs to get onto building those.
Don’t believe in any of that, the whole town this robot is supposed to be coming from does not actually exist: its supposed existence is an immense conspiracy to cover up the landing of aliens!
We already have one: https://hackaday.io/project/9976
One more way to twist up control wires. :-)