Perhaps our future overlords won’t be made up of electrical circuits after all but will instead be soft-bodied like ourselves. However, their design will have its origins in electrical analogues, as with the Octobot.
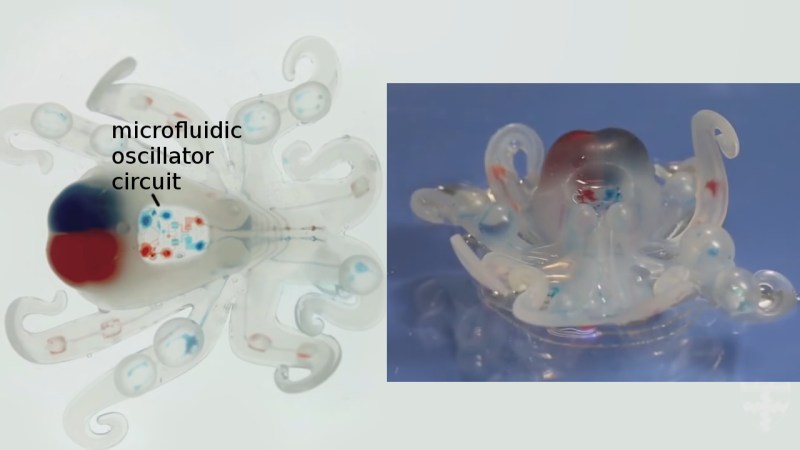
The Octobot is the brainchild a team of Harvard University researchers who recently published an article about it in Nature. Its body is modeled on the octopus and is composed of all soft body parts that were made using a combination of 3D printing, molding and soft lithography. Two sets of arms on either side of the Octobot move, taking turns under the control of a soft oscillator circuit. You can see it in action in the video below.
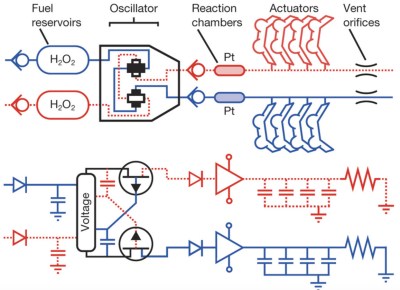
As shown in the diagram, the fuel is a liquid hydrogen peroxide (H2O2) which the oscillator gets from one of two fuel reservoirs and feeds into one of two reaction chambers. In the oscillator, pinch valves act like JFETs. When fuel from one reservoir is flowing into one reaction chamber, one of the pinch valves pinches off the flow of fuel to the other reaction chamber. It’s not clear how but somehow or other that fuel flow is then pinched off by another pinch valve as fuel then flows from the other reservoir to the other reaction chamber.
The reaction chamber contains a small amount of platinum as a catalyst which reacts with the hydrogen peroxide to release a much larger volume of oxygen gas into actuators in the arms. Those actuators expand like balloons causing the arms to move. The reaction chambers are the analogues of amplifiers. Other analogues are check valves for diodes, vent orifices for resistors as well as other chambers which appear to be capacitors.
This is a proof of concept and as yet the Octobot doesn’t walk but the team hopes to make one that can crawl, swim and interact with its environment. When it does we look forward to it joining this other soft-bodied bot modeled after a stingray. It looks like our overlords might all come from the sea.
Here’s you can see the Octobot in action.
And here’s another video from Harvard demonstrating the chemical reaction between hydrogen peroxide and platinum that produces oxygen.














someday, we may really be able to be ‘touched by a noodly appendage’ ;)
I can ‘arrdly wait brother :)
3D-printed H2O2 powered octopus, that is so ridiculously original!
Needs some kind of actuator activated by light. And you might be able to use the generated steam to jet arou…
I don\r know about everyone else, but I welcome our soft overlords.
“Just when you thought it was safe to go back in the water.”
Man, how I’d like to be part of such a group!!
Whilst reading this I am eating an octopus and chorizo salad.. delicious. I wonder how one of these creations would taste ?
Probably like window caulk.
Birth of the Flying Spaghetti Monster. Illuminati confirmed.
The circuit kinda looks like an alternating LED blinker.
People are seriously still playing with microfluidics? I think most reserach groups figured out it wasn’t much more than a really expensive toy process about a decade ago. Using H2O2/Pt or electrolysis as a pressure source has been done a long time ago. There are a lot of DFM constraints with how they can insert those microfluidics into a 3D model as well.
Most of medical applications with PDMS have ended up being useless or exceptionally expensive to commercialize since, well, it turns out virtually all decent soft lithography material have terrible permeability / longevity characteristics, especially on this scale.
I mean, seriously, all that they’ve fit onboard and all that they ever will fit onboard is a relatively enormous oscillator that’s slow as hell. I’ve seen groups playing with microfluidic logic a few years ago (which are, of course, insanely slow and cannot theoretically ever be any faster or denser than silicon – but use the same relatively expensive lithographic processes). After over the decade or two of playing with microfluidics–and a real, non-hobbyist budget (at least hundreds of millions to various lab groups!)–this oscillating octopus might be the most complicated thing that’s ever come out of it. This would be a lot of fun and super cool if a hobbyist worked it out – but the precision and accuracy required to pull this off with microfluidics ends up being quite expensive – but still useless.
*grabs bag of popcorn*
This is far from “the most complicated thing that’s ever come out of it”
https://en.wikipedia.org/wiki/Microfluidics
“Microfluidics is a multidisciplinary field intersecting engineering, physics, chemistry, biochemistry, nanotechnology, and biotechnology, with practical applications to the design of systems in which low volumes of fluids are processed to achieve multiplexing, automation, and high-throughput screening.[1] Microfluidics emerged in the beginning of the 1980s and is used in the development of inkjet printheads, DNA chips, lab-on-a-chip technology, micro-propulsion, and micro-thermal technologies. It deals with the behavior, precise control and manipulation of fluids that are geometrically constrained to a small, typically sub-millimeter, scale. ”
Lab on a chip devices are far more complicated than this demo.
Not to mention the entire market for industrial microfluidic control systems, for conditions where electronics simply cannot be used. And you though Lock-in-tag-out could get complicated…
I could see this technology being used as a toilet bowl scrubber. Or perhaps a piano player. Aquarium cleaner and gold fish massager. WIndow washer. Spy drone.
Autonomous robot?
How loosely do you have to define those two words for this thing to qualify?
https://i.ytimg.com/vi/o9v9Dn4ildo/hqdefault.jpg
I guess the drinking bird toy qualifies?
Autonomous insofar as there’s nobody controlling it with a big old bundle of rubber tubes and some large syringes. This thing’s afaik the first self-contained soft robot, with it’s power source and logic *inside* it’s body. That’s a huge step forward over all the endless 5-chamber crabs with trailing air lines.
By diluting the definition of “autonomous” and “robot” to THAT degree, a wound rubber band qualifies and would have been first.
I’m not saying this isn’t neat or didn’t take skill to create, but come on. It’s not a robot. EVEN IF IT COULD MOVE, it would take mushrooms to convince someone this thing was under it’s own control and not just randomly flailing it’s appendages.
…although those two words earned them 10x the grant funds had they been honest. So there’s that.