For the last few years of the Hackaday Prize, there have been more than a few prosthetic devices presented. Almost without exception, the target for these projects are prosthetic hands. That’s a laudable goal, but mechanically, at least, feet are much more interesting. A human foot must sustain more than the weight of the human it’s attached to, and when it comes to making this out of plastic and metal, that means some crazy mechanics.
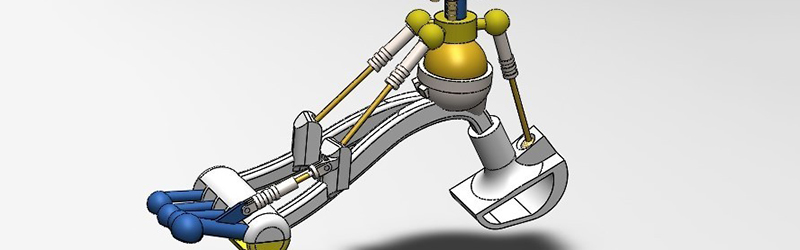
This Hackaday Prize entry is a complete reversal of all the prosthetic limbs we’ve seen before. It’s a prosthetic foot, and in the tradition of easily made and easily modified prosthetic arms, this prosthetic foot is mostly 3D printed.
A foot will take a lot more abuse and weight than a hand, and because of this 3D printing all the parts might not seem like the best idea. Exotic filaments exist, though, and the team behind this project does have access to a few pieces of test equipment in a materials engineering lab. With the right geometry, everything seems to support the load required.
There are some relatively new twists to this 3D printed prosthetic foot, including electronic control, a micro-hydraulic power plant, and sensors to measure and adjust the user’s gait. It’s all very cool, and deserves a lot more engineering than even the most complicated 3D printed prosthetic hand.


















I suppose hands get all the attention because without them, life is rather difficult as most tools are very hard to operate with one’s feet. (Think about using a smart phone with your feet… if you thought fat fingers were a problem!)
If someone’s unfortunate enough to lose both legs right at the groin, they can be largely independent (i.e. still dress themselves, feed themselves, shower, etc) and get around with the use of a wheelchair. No equivalent device exists for the poor individual who winds up losing both arms at the shoulders, they’ve just got to make do with their feet and picking things up in their mouths.
Not to say some don’t do remarkable things in spite of that disability, but the same mechanical assistance does not exist.
Still, this project is a very worthy cause, plenty of lower-limb amputees out there for various reasons and not everyone wants to sit around all day. Not to mention the wear and tear that using one’s arms for mobility places on one’s shoulders. If a replacement foot and some training is all it takes to get people back up and walking, this is worth doing.
You don’t realize just how annoying it is that you can’t stand on your tip-toes until you can’t anymore. I lost my left foot in a car accident a few years ago, and I can get around pretty good with my prosthetic, but I have wanted to build an electronic/hydraulic foot that could do just one simple thing: pick up my weight onto the toes/ball of the foot. My right leg/ankle also got messed up in the wreck, so I don’t have the ability to lift all my weight with my right foot anymore. If I had the help of my left “foot”, then I might be able to reach more things and see over others.
The electronics would be simple these days, especially with Sparkfun’s electromyography sensors (the MyoWare Muscle Sensor, $37.95USD). All I would need are two of these and a microcontroller. The problem comes when you realize that you need to be able to pick up at least ~150lbs, and you have to pull it off relatively fast. While I could pull off the electronics, I know nothing about how to design the mechanical portion of something like this. The forces involved are what makes this so much harder than a hand, even though it is orders of magnitude less complex.
Thank you for the insight. Just reading your comment starts me thinking and indeed I tiptoe a lot.
The forces are my primary concern. Just looking at the design the slim curved bars with odd angled forces to me only seem possible with space grade titanium 3d printers. No standard fdm or other plastic printer could produce this strong enough. I have seen some designer high heels with normal angles that could only be used with extreme care because of fragility.
I hope this starts a movement into non-hand prostetics.
Using a motor to quickly lift your weight is a big ask. But (assuming your legs are strong enough to, e.g., walk up stairs) you can do all the heavy lifting with your own muscles.
Design the ankle joint in your left ankle so that, when triggered, the toes can drop to point straight down, and the ankle then latches. The sequence of moves is: lift left foot off ground; trigger ankle to drop toes; left toes on the ground and your foot is now a stilt; left leg and whatever residual right-foot tip-toe ability you possess lifts you up to see over the lady with the obnoxious hat.
Triggering could be myoelectric, but a heel-click is probably more reliable. No batteries. No motors. (Maybe tiny of each to work the latching mechanism, but nothing that will drag down your foot all day every day.)
I guess the first step is to create a model able to withstand the forces and testing it with some Finite Element Analysis, even before thinking about movement.
For instance: During a normal gait cycle, for a person weighting 90kg, the predicted maximum ankle joint compressive force is between 5000 and 6000 N. (https://www.researchgate.net/publication/262838054_Hip_Knee_and_Ankle_Joint_Forces_in_Healthy_Weight_Overweight_and_Obese_Individuals_During_Walking)
I don’t think a laser sintered polyester model can withstand that, but maybe a 3D metal printed model can.
Also, wear at the joint will be an issue!