
On paper, bicycling is an excellent form of transportation. Not only are there some obvious health benefits, the impact on the environment is much less than anything not directly powered by a human. But let’s face it: riding a bike can be quite scary in practice, especially along the same roads as cars and trucks. It’s hard to analyze the possible threats looming behind you without a pair of eyes in the back of your head.
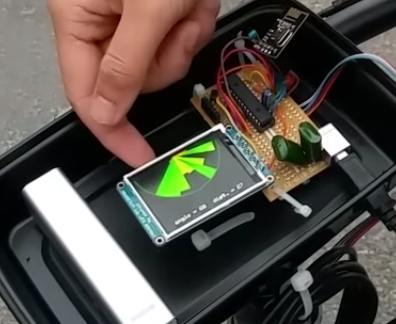 [Claire Chen] and [Mark Zhao] have come up with the next best thing—bike sonar. It’s a two-part system that takes information from an ultrasonic rangefinder and uses it to create sound-localized pings in a rider’s ears. The rangefinder is attached to a servo mounted on the seat post. It sweeps back and forth to detect objects within 4 meters, and this information is displayed radar-sweep-style graphic on a TFT screen via a PIC32.
[Claire Chen] and [Mark Zhao] have come up with the next best thing—bike sonar. It’s a two-part system that takes information from an ultrasonic rangefinder and uses it to create sound-localized pings in a rider’s ears. The rangefinder is attached to a servo mounted on the seat post. It sweeps back and forth to detect objects within 4 meters, and this information is displayed radar-sweep-style graphic on a TFT screen via a PIC32.
Though the graphic display looks awesome, it’s slow feedback and a bit dangerous to have to look down all the time — the audio feedback is by far the most useful. The bike-side circuits sends angle and distance data over 2.4GHz to another PIC mounted on a helmet. This PIC uses sound localization to create a ping noise that matches the distance and location of whatever is on your tail. The ping volume is relative to the distance of the object, and you just plug headphones into the audio jack to hear them. Bunny-hop your way past the break to check it out.
Thanks for the tip, [Bruce Land]!













Huge greencaps! So huge!
And I do like the simple-but effective servo-to-ultrasonic mounting, need to remember that for budget robot projects.
Also a neat idea! Next step.. waterproof!
Cool idea, but earbuds in your ears while riding isn’t a great plan. Small speakers in the helmet would be better, or haptics. In the name of knowing where the traffic is it’s not a great idea to block out the sound of traffic.
Adding haptic feedback is a nice idea, adding two motors on left and right to know where the traffic is.
Agreed. It’s illegal to wear headphones while biking where I live. Needs work. Additionally, I find it interesting that people are doing this stuff for final projects in university when I do it for fun. Maybe I should start looking for a different job. :/
To underline that, one of the members of Stereolab, an incredible band was killed on her bike while riding in London traffic with headphones on.
Having put a couple hundered thousand miles on a bike (over 40 years), I learned quickly where the cars where by just listening to there noise. The Prius and Tesla are scary quite though!
While this is certainly cool, I’ll stick with my helmet-mounted mirror and my ears, unencumbered with headphones, to give me situational awareness while cycling.
+1 for helmet mirrors. These enable the user to look forward and behind at the same time.
Interesting idea, but when cyclist will be travelling at 25km/h and closing vehicle at 50km/h, with range of 3.6m it leaves you only half second reaction time not considering other delays.
What about helmet mounted mirror? I feel uncomfortable without it when cycling.
Finally a use for all those early highschool “situation” math questions. ;D
That’s generally not an issue in my experience. The most dangerous situation when biking is when you’re going to go straight and a car is going to turn right. The car might be lurking behind you for several seconds.
I though it was when your travelling 25km/h and a car goes past at 60km/h and opens the passenger door as they pass.
I get to listen to NPR and flac files on my rides.I would hate to have to listen to beeping ever unless it’s code and I could copy.
My rear-view mirror all of 2 square cm. of glass epoxied to a hard steel wire wound vine like on my glasses. I don’t leave home without it as it is left clipped to my glasses. Have had many events even lately “is that Google glass?”, sometimes it’s fun to play it up for a while. But seriously heads up positioning and no ‘duino, just military accuracy and confidence is high.
The thing is Google glass is on the right, but in the US we need to see what is on out left so that’s where the mirror is.
This is a great idea and it would probably save lives – but not those ear buds!
I live near a highway that has bike lanes but I don’t ride there because I don’t trust the traffic at higher speeds.
Can anyone think of a way to do this in real time without a servo going back and forth?
Great people proof of concept.
An array of transducers could get around the physically sweeping sensor issue.
In its current form sure it’s got a few issues but you’ve got to start somewhere.
I really like it – as long as it worked better than the stupid ultrasonic reverse sensor thingy on my wife’s car
Only a scanning LIDAR is a good approach for this.
Maybe stereoscopic cameras.
You can have one sensor module for each bar in that graph and if placed on the helmet around the back edge use the random motions of the rider’s head to fill in the sub pixel data to some extent.
Build it all into a helmet, and use a gyro chip to compensate for the rider’s head movement.
I agree with the others, use a sensor with a longer range and dump the ear plugs, for vibration motors in the helmet itself.
make it sound like the motion detector in Alien (1979).
for reference : http://youtu.be/pcTl-PKXs7Q?t=2m37s
Because having a truck pass you 50 cm away at a closing speed of 40mph isn’t scary enough?
I wouldn’t call that scary, I’d call it life threatening.
Looks good, but I have to agree with other commenters that it needs to go to an array of receivers so the PIC32 can do angle calculations (hopefully). Otherwise, something like this
wide are 2 channel 24GHz radar module:
https://detail.1688.com/offer/43083367010.html?spm=a2615.7691456.0.0.jGMZRl
Similar, narrower field, but it has IQ ports so you can determine if it’s coming or going.
https://detail.1688.com/offer/43627452959.html?spm=a261y.7663282.0.0.XNBiey
(neither has a transmit amp or LNA’s so the range will still be limited, should see cars at least).
I really haven’t been able to find anything affordable stateside that can do this, and I have no idea how to get my hands on them either.
Interesting, could also consider the X-band Doppler modules used for through-wall motion detection. IIRC, I got a pair for under $15. These have been on Hackaday before. I was going to try to whip up something using Cypress PSOC analog programmable logic to do the Doppler decode… These things have transmitter and receive mix-down so the Doppler output is in the realm of audio-range frequencies. HB100 modules they are called, 10.525 GHz, range over 20 meters.
Those are single channel relatives. These modules are fully FMCW capable so, with signal processing, you can get range and direction information out of them.
Can you post a part number? Those links are now dead.
Will this lead to blind people riding bikes ?
Given that these sensors are as low as $1.34 on eBay – I have 10-20 of these myself, and also considering sweep latency and servo long-term reliability and power consumption, AND also considering these are ~15+ degree beam width anyway, you’d get much higher performance from an array mount in degree arcs matching the beam widths. Potentially, given the beam width, all units could fire simultaneously, at the very least, alternating. Given 12 sensors in a 180 degree arc, and the range of 4 meters being about 8 meters round trip at Mach = 340 m/s, that’s about 24ms minimum sample time, about 40Hz. Assume for a moment that you need to do the odd/even swap and your PIC/Arduino/etc can do multiple timer hits to handle 12 sensors (6 at a time), that gives you 20 Hz sampling rate. Now that would be awesome and with no moving parts… from the vid, it looked like it took more than a second to do a sweep- terrible when vehicles might be closing at 30 m/sec and your range is only 4m!!
really?!?!
Buy this! dont be stupid. https://www.amazon.com/Zone-Tech-Reverse-Backup-System/dp/B0087QI3GM add battery and your done!
There system is waaaaaay to slow to save them. they will be dead under a car before they hear the beep!!!
If you are an every day biker you will instantly see that this idea is not really worth money and effort since the benefit is far too low if there is any at all. Regarding her bike at the first picture I would suggest to mount a good lighting system, more reflectors and wearing a neon colored vest (and of course that helmet). That should be a good prevention.
Indeed, retro-reflective bands are great and can be bought in pairs in the US at Dollar Tree for $1. These are the slap-band types that coil around your wrists with a quick slap – curved spring steel with an arch, like a measuring tape. Of course, there are handlebar-tip mirrors that also work, no batteries required.
I wonder, why bikes do not have rear view mirrors. I used to ride a motorbike for several years and I take the car quite often, whilst I ride a bike (the muscle powered one) only occasionally. But I often find myself trying to look into the side rear view mirror, only to remember, that there is nothing.
I mean that’s an easy passive (reliable, needs no battery) solution.
Cost and drag I suppose. They aren’t expensive but on a relatively cheap machine to start with they are a reasonable percentage. Also, as I’m sure you’re aware, pedalling is harder work than turning the handlebar ;-) so I assume drag is a factor
Mirrors like the bikes themselves need to fit the rider and there is no one size fits all. I ride several hours a day all year round, weather permitting and it took me awhile to find a rear view mirror (in my case helmet mounted) that gave me the coverage I needed. Meanwhile my brother-in-law swears his two handlebar mounted ones – whatever you are comfortable with. Drag isn’t a huge issue for most riders using their bikes in mixed traffic.
It’s hard to find a lightweight, cost-effective mirror that will hold its adjustment over the bumps and wind force.
Well you are not going to find a good one at the dollar store, but most of the ones that are sold by bike shops are good. You will however have to pay more.
I started with a Third Eye(tm) from the bike shop, and a few years later ended up with a round mirror (from the 3rd eye) attached with #12 copper wire for the “stick”. The copper wire is epoxied directly into the helmet. This is the best so far, and I’ve seen a few other tries and failures of other brands.
The plastic stick and its flimsy ball and socket joint just doesn’t last.
The best commercial ones are these:
https://www.efficientvelo.com/home/safezone/
designed by a toolmaker it seems. I found these after several disappointments with hard stick types and I have been happy with them for several years now.
@DV82XL Thanks for the link! Have also been struggling to find a good helmet mount mirror. Stickum wouldn’t stick, adjustment wouldn’t adjust far enough (or stay!), mirror too small to mirror enough… will give this one a try!
“The one that gets you is the one you didn’t see.”
State of (consumer) art is probably at Garmin, who picked up a crowd-funded development and market it as Varia. Some interesting comments on real world usage here:
https://www.dcrainmaker.com/2015/10/garmin-varia-radar-review.html#usage-notes
And integrated in heads up display here:
https://www.dcrainmaker.com/2016/01/garmin-varia-vision-hud.html#use-with-varia-radar
I very much like the build, must be good fun to make.
I doubt if it is much safer but it made me thinking of some system that only looks left from me, how far away do cars pass me, quite some countries have already set a Minimum Overtake Distance, see http://www.safecyclingiom.com/minimum-overtake-distance/4588861521
On general bike safety: Best safety comes in numbers, the Netherlands has the highest average of bicycle kilometres per person (average 300 rides, 878 kilometre) but also the lowest number of fatalities per bicycle kilometre (12,3 fatalities per 1E9 km), so get your friends, family and co-workers cycling ;-)
That URS sensor scans WAAAAY too slow to be really useful in a real world situation. A good improvement would be to gang several sensors together and thus reduce the amount of arc each sensor has to sweep. Or to replace the URS with the new laser rangefinding module (such as the VL6180 or similar). An alternate / better improvement could be to use one of the laser rangefinder chips to set up a high-speed rotating scanner, similar to the LIDAR modules in the iRobot.
Another problem with the visual indicator is that the MOST IMPORTANT INFORMATION– e.g., a CAR getting ready to run you over, is displayed with the SMALLEST RED BLIP which is hardly noticeable. While the green safety indications, which are essentially superfluous eye-candy, take up the entire screen.
I live in another country that has wide bike paths mostly for ebikes that are very prevelent here. I have a trunk mounted on the back of my bike that I would like something like this detector mounted in that would simply start beeping when something from the rear approaches – but need greater than 4 meter detection. Right now will just get some mirror extensions to move them out about two inches to get a better view of the rearside. I hate being surprised by speeding courier/food delivery bikes.