Mass storage presents a problem for those involved in the preservation of older computer hardware. While today’s storage devices are cheap and huge by the standards of decades ago their modern interfaces are beyond the ability of most older computers. And what period mass storage hardware remains is likely to be both unreliable after several decades of neglect, and rather expensive if it works due to its rarity.
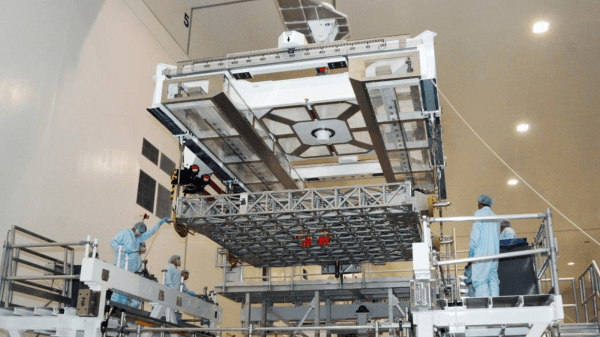
The Domesday Project 86 team face this particular problem to a greater extent than almost any others in the field, because their storage device is a particularly rare Philips Laser Disc drive. Their solution is the BeebSCSI, a small board with a CPLD and an AVR microcontroller providing host adaptor and SCSI-1 emulation respectively for a modern micro-SD card.
![An original BBC Domesday set-up. Regregex [CC BY 3.0], via Wikimedia Commons.](https://hackaday.com/wp-content/uploads/2017/01/640px-vcf_2010_domesday_tray_open.jpg?w=400)
There have been several resurrections of the project over the years, including one from the BBC themselves which you can browse online. What makes this project different from the others is that it strives to present the Domesday experience as it was originally intended to be viewed, on as far as possible the original hardware and with the original BBC Micro interface. Many original parts such as BBC Master systems are relatively easy to source in 2016, but the special Laser Disc player is definitely not. This board replaces that impossible link in the chain, and should allow them to present a glimpse of 1986 in more than just the on-screen information.
If you would like to see an original BBC Domesday Project system, you can find one in action at the National Museum of Computing, at Bletchley Park. Meanwhile we’ve already featured another peripheral from the same stable as this one, the SmallyMouse USB-to-quadrature mouse emulator.

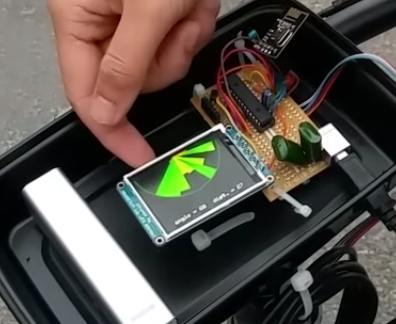 [Claire Chen] and [Mark Zhao] have come up with the next best thing—
[Claire Chen] and [Mark Zhao] have come up with the next best thing—
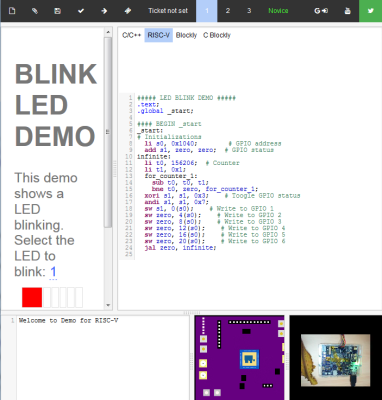 You can now program the
You can now program the