
It’s impossible to know when society began to manicure its front lawns. Truth be told — cutting the grass was, and still is a necessity. But keeping the weeds at bay, trimming, edging and so forth is not. Having a nice lawn has become a status symbol of modern suburbia all across the globe. When the aliens arrive, one of the first things they will surely notice is how nice our front lawns are. This feature of our civilization could have only been made possible with the advent of specialized grass-cutting machines.
The first mechanical lawnmower was invented in 1830 by a man named Edwin Budding, no doubt in an effort to one-up his neighbor, who still employed a Scythe. Budding’s mower looked much like today’s classic reel mowers, where a rotating cylinder houses the blades and rotates as the mower is pushed forward. Budding was granted a patent for his device by England, much to the dismay of his fellow neighbors — most of whom were forced to buy Budding’s mower due to the fact that everyone else in the neighborhood bought one, even though they weren’t actually needed.
By the early 1930’s, the cold war started by Budding and his neighbor had spread to almost every front yard on earth, with no end in sight. Fast forward to the modern era and the lawn and garden market did 10 billion in sales in 2014 alone. Technological advances have given rise to highly advanced grass-munching machines. For smaller yards, most use push mowers powered by a single cylinder IC engine. Many come with cloth bags to collect the clippings, even though everyone secretly hates using them because they gradually fill and make the mower heavier and therefore more difficult to push. But our neighbors use them, so we have to too. Larger yards require expensive riding mowers, many of which boast hydrostatic transmissions, which owners eagerly brag about at neighborhood get-togethers, even though they haven’t the slightest clue of what it actually is.
Us hackers are no different. We have front lawns just like everyone else. But unlike everyone else (including our neighbors) we have soldering irons. And we know how to use them. I propose we take a shot-across-the-bow and disrupt the neighborhood lawn war the same way Budding did 85 years ago. So break out your favorite microcontroller and let’s get to work!
Will the REAL Autonomous Lawnmower Please Stand Up
Firstly, let’s put one thing to bed. Those ridiculous “robotic mowers” that use a boundary wire and cut in random paths are not what we’re talking about. Any hacker worth their weight in 0.1uf capacitors knows it needs positioning. “How’s that?” , you ask? Well, just watch one of those things scurry about like some stupid bug running from the wind and you’ll say to yourself — “You know, this thing would work a lot better if it knew where the heck it was”. And that’s what we’re going to do. In order to make a real autonomous lawnmower, we need positioning. If we can locate our mower on an XY Cartesian plane, then the automation part is much easier to do.
Yes, there are other ways to achieve autonomy for our lawnmower and I highly encourage you to discuss them in the comments. But this article will focus on autonomy via positioning. Specifically, positioning provided by satellites.
GPS, RTK and Differential GPS
When it comes to getting a fixed position on something outdoors, the first thing that comes to mind is GPS. The second thing that comes to mind about 25ms seconds later is accuracy. We all know that GPS has an accuracy of about 15 meters or so. And that’s not going to work for our autonomous lawnmower. There are two other options, however: RTK and Differential GPS. Both have the accuracy we require.
Standard GPS
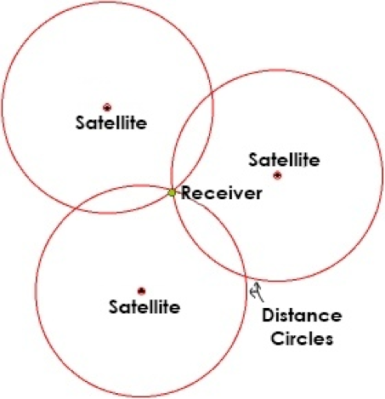
Before we get into the other systems; let’s do a quick review of plain old GPS. The GPS in your phone is measuring the distance between it and at least three satellites. This allows it to find its location via trilateration (not to be confused with triangulation). The accuracy of course is determined by the accuracy of the distance measurement to the satellites. This distance is determined by atomic-clock-precise time stamps coming from the satellites. The receiver simply takes the difference between the time of transmission and time of reception and multiplies it by the speed of light to obtain the distance between it and the satellite.
Along with a time stamp, the satellite also transmits its position. Armed with the distance from the satellite and the position of the satellite, the receiver essentially knows the radius of a circle — with the satellite at the center and the receiver on the perimeter. Once three of these circles come into contact, BAM! You’ve got your location via trilateration.
There are several things that limit accuracy; one of the biggest being the atmosphere. The ionosphere can slow the signals, causing problems. The more atmosphere the signal has to go through, the greater the effect. So a signal coming from a satellite on the horizon will be affected more than from a satellite directly overhead. This type of interference is constantly changing and introduces an unavoidable margin of error in positioning — up to 10 meters.
RTK and Differential GPS
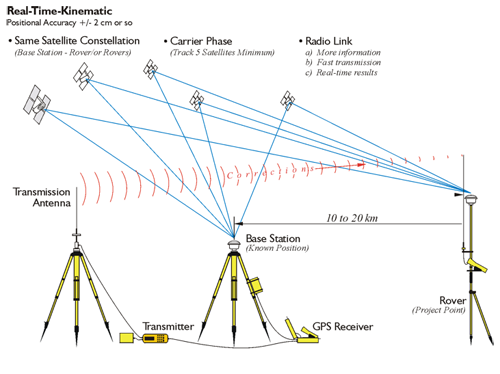
Now that we know how GPS works and its fundamental limitations, we can understand how to remove those limitations to obtain a higher level of positioning accuracy. This can be done with the introduction of a second “fixed” receiver. Fixed meaning it doesn’t move and its location in known exactly. The mobile receiver (the one that needs positioning) must be relatively close to the fixed receiver, so the two receivers can compare signals from the same GPS satellite and then talk to each other about it.
The fixed receiver looks at the GPS signal received, and then looks at the signal received from the mobile receiver. Because the fixed receiver already has a known position, it can see any error in the signal, and send the correction over to the mobile receiver. This is how both Real Time Kinematic (RTK) and Differential GPS work.
Differential GPS can get down to about 10cm accuracy. RTK looks at the analog part of the signal along with the digital part, and can get down to 2cm accuracy. Which is plenty accurate for our automated lawnmower.
Free Market Options
There are some options available to purchase hardware for this type of positioning accuracy. They’re not inexpensive, but also not out of reach for anyone (or group) who wants to take a serious bat to this project. REACH RTK is the cheapest we can find at abotu $570, but the kits sell out quickly every time they come back into stock. There is also Swift Navigation’s Piksi setup, a more expensive option (that we’ve covered before) which rings in at about $1k. If you know of any more RTK setups out there, be sure to let us know in the comments.
Using an RTK GPS setup for an autonomous lawnmower is now within your or your team’s grasp. If you know where the thing is in real time, writing the code and doing the mechanical engineering are problems with common and straightforward approaches. So why hasn’t it been done? What are you waiting for?
We’re Talking Lawn CNC
Maybe this will charge your capacitor banks… What happens when you combine an autonomous lawnmower and gcode? Mind-blowing awesomeness? Give your mower the ability the turn the blades on/off and you could be CNCing your grass instead of just cutting it.
The picture I’ve painted makes sense or larger turfs where the relatively small and battery operated robomowers are less effective. With a large enough land area it becomes less reasonable to install a perimeter wire and makes the GPS setups more desirable (although there are ways to fake the perimiter wire signal which could make for an interesting GPS hacked onto an existing robot mowers).
At a consumer level there are kinks to work out for large scale autonomous mowing, like safety, obstacle avoidance (fallen limbs, people or livestock), fuel level monitoring and the like. But for hackers, this concept is too fun to pass up. We’d love to hear about your adventures in automated mowing, and fully expect we’ll one day see a 1-acre sized Skull-and-Wrenches carved into a grassy field. Send us a tip with your story and it might end up on the front page.














There are a few cheap RTK options these days, Navspark is one. Hopefully we will see lawns cut autonomously soon!
http://navspark.mybigcommerce.com/ns-hp-rtk-capable-gps-gnss-receiver/
Those modules look pretty amazing. How long until they sell out? Too bad they don’t natively output NMEA and kit with a suitable antenna. It would really be “Take my money now!”
Oh look. It does do NMEA.
I’ve used them in several applications, they seem to work quite well for the cost. They just did a production run on their gps/glonass units too :)
Hi unematt, I got two of them but never really got them working. Do you have a few tipps?
What is your issue? The application they provide on their website for the configuration worked well for me.
And here’s someone actually discussing how to use those modules (in a lawn mowing context, no less!): http://grauonline.de/wordpress/?page_id=1468
Many lawns already have boundaries, just teach the bot to recognize the difference between grass and various fences, bark, and ornamental plants.
The other thing is, they can be slow. If it covers the lawn once a week that’s good enough for most places. The cutting tool can be some kind of little nipper.
Just like farming bots, the mapping can use one time learning, and then just remember the field since its going to be ther for the lifetime of the machine.
I think this is really the key. Yes, we don’t want a >100 rpm spinning sharp blade running rampant, but if it’s something like the electric sheep, featured on .IO a few months ago: https://hackaday.io/project/12642-solar-lawn-sheep, it would be safe and effective.
Seems a bit complicated I’d go with a string or sickle type trimmer mechanism esp if it runs every day or two as there would be no need to collect the clippings since they would be small enough to compost where they’re at.
It would also be handy if it could differentiate between grass, dog, cat and baby.
And dog/cat poop.
baby poop too….
Combine your ideas with others that I have and the lawn mowing industry is hereby disrupted.
One word: liability.
Exactly. Imagine equipping a Roomba with a chainsaw then letting it loose in your yard while you go off to work.
http://i.imgur.com/hQtawEg.jpg
These things need to be far more advanced, have sensors and actual programming. Which equates out to being not cheap. Not to mention the whole liability concerns and an existing legal framework that these do not fit well into at present.
fixing your image link cuz it made me laugh
http://imgur.com/hQtawEg
Whoops, sorry about that. Did it not show correctly? It loaded for me but it might have just been a locally cached version or just the URL? Might have needed to add some code to it.
It is an annoying problem. WordPress doesn’t work well with imgur. You have to post the link without the .jpg extension.
This happens all the time!
This topic has always intrigued me. One other/additional resource depending on area is Continuously Operating Reference Station (CORS). These operate all over and are often free to use within certain limits. This offers up the possibility of rovers that are more mobile than the 10-20km.
Wouldn’t that be cool if lawnmowers could mow the lawns by themselves, so we wouldn’t have to.
But of course, humans would still have to empty the lawn bag
Robot composter, anyone?
If you mow the lawn frequently enough, the clippings will be super small and quickly compost.
Yeah I never used lawn bags personally. Don’t see the point in robbing nutrients from the ecosystem.
That’s exactly how the current models work. I have a WORX Landroid, and it’s meant to shave off a small amount of grass every day. There’s no bag, and no noticeable clippings around.
buy a freaking goat.
it even distributes the fertilizer randomly, and also produces milk.
See also: miniature hereford cows
One other/additional resource depending on area is Continuously Operating Reference Station (CORS). These operate all over and are often free to use within certain limits. This offers up the possibility of rovers that are more mobile than the 10-20km.
autonomous lawnmower, already done:
https://www.youtube.com/watch?v=dmCQkosIa2k
Just missing some basic ai
My daddy always said, “When you want to insert a nail into a piece of wood, don’t do anything fancy or glamorous. Just take the damn hammer and hit the son of a bitch until it’s in.”
Cue the Benny Hill music.
and some scantily clad women chasing the mower. Instant Youtube hit!
No no – the scantily-clad women must be CHASED by the mower! Yakkety Sax all the way, until they crash into a heap when they get to the center post. har har
That made my day, love it!
Sometimes the simple solutions just escape our notice… Thanks to this guy for reminding us to use a does of appropriate technology in our designs!
Combine that with the approach of those wallbots that hang on strings winched in and out with steppers and you have your CNC.
I’ve been thinking about it. For small enough lawns, what about fixed position cameras. Then it becomes a computer vision problem. I can’t think of any problems a system equipped with vision couldn’t overcome. If you put IR beacons on the bot then a camera (or two) could know the position, orientation in relation to a defined mesh model of the yard. It could also watch for obstacles (or chase cats). I have a remote lawn mower and it takes many corrections per second to drive it in anything like a straight line, but I think CV mixed with Kinect-style 3D mapping could accomplish it.
And it’s not like you’re going to send it out in heavy weather conditions where the camera can’t see.
Good call.
RTK systems are becoming fairly common, the typhoon H uses it if you have their largest GS/TX combo.
zubax also provides standalone gps/RTK modules, we use it on our PX4 based drones.
still around 100usd pr module last time i checked, with two needed and external radios it is far from easy or cheap.
Actually, i think a combination of a boundary wire or similar system (map based?) and some clever programming to slice up the area in efficient paths is the way to go.
tl;dr: Permaculture.
First thing I did on my new property is to install a food forest – OK forest is a bit much for a hand full of trees.
Step one bury the grass under 10cm of woodchips.
Step two plant a lot of stuff – still working on that one in year 2.
No forget that, the real step one was using a excavator to dig up the cherry laurels and dig a fish pond.
Also used the excavator to dump the cherry laurels in to a hugel bed.
For the little bit of grass that is left, I use my scythe – it gives me a lot more pleasure then a weed whacker.
For people that don’t know what Permaculture is: Think of hacking ecosystems for your goals.
If you just can’t let go of your lawn, here is what permaculture has to offer you:
Organic Lawn Care For the Cheap and Lazy
https://richsoil.com/lawn-care.jsp
Checked out the website, I may have to consider mowing high (as in higher blade, not the other “grass”, for those not familiar).
Also, I have never bagged as I use a mulching blade. Nor watered or used fertilizer.
Yes.
If we can all agree that being sod farmers isn’t as great as we make it sound then we can make some progress on getting worthwhile plants put in place…
Plenty of low maintenance ground cover out there that could replace grass. Much of it requires less water, some of it produces food… lots of good options if we are willing to give up on grass and consider that there are better options…
even skipping the ground cover evergreen bushes/shrubs can make for great yard fill in areas that you don’t plan to walk on (like most people’s front yards around me.)
I still have the magazines and am considering building one since it’d be a lot easier now with an Arduino or Raspberry Pi, but back in the early 90s in Electronics Now they had a series of articles on a project called The Lawn Ranger. It used a row of 8 IR LEDs and phototransistors for control, and had a series of spinning blades to do the cutting. Two motors, one for each drive wheel, powered it, steering was accomplished by turning one of the motors off. Basically you mowed around the edge of the lawn and any obstacles (Either with a standard mower, or with a control box that plugged into the back of the Lawn Ranger). It then used the row of LEDs and phototransistors to follow the cut edge of the lawn.
The original IIRC used a Z80 microprocessor and some custom code loaded onto an EEPROM that one could either download from their BBS (File was long gone even in the late 90s when I first thought about building this), or could be ordered pre-programmed into an EEPROM (Again from a company that was defunct even in the late 90s). I had a block diagram of how it worked but no source code, and back then my options were limited. I knew how to do it using the parallel port of an IBM PC but that was a bit big to cram onto a lawn mower, was going to use a Commodore 64 but the BASIC language was different enough I didn’t quite know how to do what I needed to do, so I never built it.
Hell, forget the automation, mount a couple of cameras on it and use a laptop and a game controller to control it, maybe interface it with Pokemon Go, that’d get the kids eager to mow the grass :-P
FPV lawnmower racing. People have fun and the yard gets mowed.
When Trump cuts off access/accuracy to GPS because NATO are not contributing, it’s going to have all sorts of interesting side effects.
White-house attacked by swarm of lawn mowers?
Drones with hair clippers.
Simone Giertz actually did attach a hair clipper to a drone, but not even she was mad enough to let it loose on her own hair. She only tried it out on a wig on a dummy head.
Robotic lawn mowers using reflective optical markers existed 10 years ago. You don’t need GPS for your lawn mower.
This is a subject I’ve given a lot of thought to as well.
The DGPS and RTK locating options have the benefit that the signaling infrastructure is already in place but I think more localized navigation is a better fit for this problem in small to mid sized yards. Your lawn mower doesn’t need to know where it is on earth; just where it is in your yard. Most GPS receivers I’m aware of also have limited update rates of 1Hz – 10Hz. I don’t know if RTK offers faster updates but 10Hz is probably the lower limit for update rates I would be comfortable with in this application.
Using ultrasonic or RF beacons at fixed locations around an environment are positioning techniques that have been featured here on Hackaday before. I don’t know how mature those solutions are at this point though. I suspect there would still be a fair amount of development effort required to get useful results with integrating those techniques.
I’m hopeful that some of the technologies being developed for indoor navigation could be applied to this problem. Does anyone have recommendations for existing systems along these lines?
As someone who likes to play with ecological design, I just sort of feel like this is solving the wrong problems. Sorry to be a party pooper; I realise that it’s super exciting to start brainstorming how this sort of thing could work… I just think the most important question was left on the table: “why lawns?” http://www.foodnotlawns.com/
Why would anyone ever want to give up sod farming! /sarcasm.
seriously though I love the idea of food not grass… but not everyone is up for maintaining the food plants either.
But there are other options out there, even if you plan to walk on it there is ground cover that can handle it… we just need to get people to accept that it’s not crazy to grow something other than sod…
I can accept that (although with some difficulty since I love being out there with my wife and kids growing food). And I can accept that lawn really is good for some things (you can’t play badminton in an orchard). It just struck me as bizarre that our solution to a problem we created for ourselves would be to design stuff that would demand more work, non-renewable and tinkering. (I guess I forgot that this is a forum for people who consider tinkering a pleasure ;) ) plus I was probably feeling a bit cantankerous!
To clarify: I can accept that not everyone is up to growing their own food. I left it kinda ambiguous.
When I first started to build my off the grid home in the woods, I had the idea that I did not want a “lawn”, i.e. no grass to mow. It wasn’t too long before I learned the answer to “why lawns?”. MUD! While I don’t have the ideal “lawn” reminiscent of a stately English mansion, I do have some open ground that needs covering. Hence, the need to mow. Mostly weeds and natural grasses.
For an automated system to be practical, it would need mapping as opposed to a Roomba style random path, obstacle avoidance and safety (string, no blade) and the ability to handle oddly shaped spaces. With the available tech, it should not be too difficult.
So this article really hits home. Also don’t nail since this is a self plug. I have been working on building one of these systems. Below is the video of my first generation mower. End of this month I am wrapping the final touches on my second generation, like 10x better.
https://www.youtube.com/watch?v=0E3I6uQX4M0
Few things to note:
– No boundaries or cables to install etc
– This is a rough prototype to see if we (mainly I), could interface with gas mowers using hydro transmissions. The answer is yes but it is clunky in the video. It is amazing how easy humans are able to drive a mower in a straight line and make instant corrections.
– There are no safety systems on this version, it was mainly me eating a sandwich (why I can hardly speak halfway through the video) and a remote kill switch on always in my pocket.
– The sandbag isn’t to trick the seat sensor into working, the reality is mowers are designed around the weight of human on it. Throwing a sandbag there really changes the kinematics of the mower.
– The speed of the mower is a bit slow and the next generation we are wrapping up has double the speed. The mower in the video is cutting around 3.3mph, which is slow. Increasing the speed led to a little bigger area but also we learned the hard way what happens when you don’t have jolt/vibration isolation.
– Near the end of the video I’m talking about how it should make a good turn, it turns and then does a zig zag back and forth. This is a prime example of the control system making corrections but the actuators themselves too slow resulting in bad steering.
– Yes it is running a RPI3 with the Navio2 shield.
– Our next generation uses a fully electric commercial grade mower (8hrs cut time on single charge) which talk analog vs mechanical for driving.
More info can be found here along with gps traces https://community.emlid.com/t/robo-mower/4397.
Nice project Lee! Are you using the Reach RTK kit to get positioning?
A previous iteration did use the Reach. At the time I had some issues so moved to a commercial GNSS setup. Since then Reach has had some BIG updates that fixed a lot of the issues I was having. If I can find some free time I need to break out my Reach and give it another try.
Lowering home values in your neighborhood since 1999.
My Worx lawn robot works great without GPS.
https://www.youtube.com/watch?v=bGLdU1TCrR8
Just uses a buried wire perimeter. It comes out every other NIGHT or so (rain sensor) and deals with the rocks and deck posts and garden border and slopes and islands just fine. No long grass patches. Even when we first used it on the longer grass and when we use it at the start of the season, it does a good job of getting all the spots within one week. After a few weeks it definitely does some learning because you’ll see it orient it self correctly to the long sections.
I have one of these, too. It’s the orange model.
It works pretty well. The one thing is that the boundary wire easily gets chewed up and broken during the winter freeze/thaw cycle, often in multiple locations. It will also get buried slightly over the same time period, so it’s a pain to track down the break in the spring. Not hard to patch once you find the place, of course.
I tried a trick, suggested for invisible fences for dogs, where you attach an RF choke to the line and use an AM radio to track down the location. It sorta worked, but not well enough to pinpoint the break.
I hate mowing the lawn, so this was a great solution for me. It’s not without its downfalls, though. Those downfalls would be mitigated by a more sophisticated positioning system.
Put some slack in your perimeter wire in various places and it will reduce/eliminate wire breaks from winter freeze/thaw.
Well the whole point of the article was to review alternatives to get rid of the classical perimeter wire seen everywhere and renowned for its maintenance hassles.
I’m amazed this important documentary on the consequences of robotic lawnmowers has not been referenced: https://www.rottentomatoes.com/m/frankenhooker/
One can buy robotic lawn mowers that work on area limited by boundary wire. You can define non-go areas, corridors and parking zone. IMHO it is safer than RF/GPS method.
rtfa
My idea – string.
String on a spring-loaded spool, by measuring the angle and length of pulled string, we can get a reasonably accurate position for something the size of a front yard.
Precision angle and rotary (for the string length) sensors are fairly cheap now, the rest is simple trigonometry.
Now replace said string with ultrasonic traducers and you’re done.
I’m also quite shocked that the ION autonomous lawnmower competition hasn’t been brought up, with many robots utilizing image processing and other advanced methods.
“For smaller yards, most use push mowers powered by a single cylinder IC engine.”
Really? Certainly in the U.K., electric ones are way more common. Flynn designs are very effective for sensible sized lawns. Wouldn’t use one for a football pitch (that’s a soccer pitch to you), but they’re very cheap, much quieter, less polluting, and require less maintenance.
Whoops, Flynn should be “flymo” – autocorrect.
The Flymo’s are basically hovercrafts. So I guess we steer them with propellors ? :)
I’ve started reverse engineering the Worx lawnmower. Hardware is more or less reversed, but haven’t come long into development of new firmware yet.. https://hackaday.io/project/6717-project-landlord
There was Mobot in the mid ’60’s. On NPR the other day a report told in California the pollution of lawn-care tools including blowers will surpass that of auto and truck sources soon. Two strokes. Users of such as backpack blowers breathe intimately that pollution. Pedro is pissed too. Mow your lawn once with a gasser or drive 170 miles to make the same amount of overall damage.
There is something going for the roomba approach or sheep. The habitual patterns of human or AI drivers of mowers can leave ruts, stripes, and concentrated damage.
Most of the gas powered yard equipment has switched to 4 stroke engines, starting in the late 90’s. More convenient than 2 stroke by not having to mix gas and oil and efficiency and materials and design improvements have made power increases possible without increasing the weight, or with minimal increase. You won’t find many flathead ICE’s on them these days.
The main holdout for 2 stroke engines had been chainsaws, where every gram less makes it easier on the user.
I’ve seen claims of a lawnmower polluting “as much as eight cars”. That’s flat out impossible due to the mower not burning anywhere near the same amount of fuel. If whomever cooked that up is going by running the same amount of fuel through, how much time would it take one mower to burn 100 gallons of fuel VS 100 gallons spread among eight cars? And which cars?
Its not the about of emissions it is the type of emissions that is emitted. Modern cars have a whole emissions control that sort of makes them pretty clean. Off road emissions aren’t required to have any emissions control so they blow it out the pipe. The nox and vox is sooo much higher in offroad than just carbon emission.
I would be shocked if the pollution (NOx, SOx, CO, etc) was *only* 8x that of a modern car.
“Mow your lawn once with a gasser or drive 170 miles to make the same amount of overall damage”
Or mow it with a diesel, and use half the fuel, yes literally half. I switched from a John Deere 322 (3 cylinder gasoline, aka petrol) to a John Deere 332, which is a 3 cylinder diesel and it used half the fuel or less. The 332 has a little less power than the 322 but the savings in fuel was worth it.
You can blend waste vegetable oil (WVO) in with the diesel, 50% WVO, 50% pump diesel, to change the smell of the diesel exhaust and get rid of nearly all the smoke. It’ll also run quieter and the WVO provides better lubricity for the fuel pump.
Cleaner for the environment, due to less fuel being consumed and using up the WVO which would be garbage.
Why did President Woodrow Wilson keep a flock of sheep on the White House lawn?
The sight of sheep grazing on the south lawn of the White House may seem unusual, but during World War I, it was a highly visible symbol of home front support of the troops overseas. The flock, which numbered 48 at its peak, saved manpower by cutting the grass and earned $52,823 for the Red Cross through an auction of their wool. The Wilsons wanted to be a model American family helping the war effort, so they suspended entertaining at the White House and actively participated in public programs. Margaret Wilson sang to raise money for the troops. Mrs. Wilson organized war bond rallies, which were held on the steps of the Treasury Building with appearances by such Hollywood stars as Charlie Chaplin, Mary Pickford, Marie Dressler, and Douglas Fairbanks. She also demonstrated her support by publicizing White House compliance to food and fuel conservation programs spearheaded by Herbert Hoover, one of Wilson’s dollar-a-year-men and head of the Food Administration.
Source: whitehousehistory dot org
https://3ff009b6523c0c1f8b94-091582592a5f780b4bac3b68414d35fd.ssl.cf5.rackcdn.com/default/_superImage/Sheep_South_Lawn_1923.jpg
Stop cutting grass, it all started as a “look, I’m so rich I don’t need to grow food in my land” thing, it then degenerated in to a “look how flash my lawn mower is” thing, but sadly most people have high fences and we cant see how flash their mower is, which is why grass cutting machinery of any description is incredibly noisy, unlike sheep.
Not that sheep are any form of solution, they’re prone to a million different diseases, the first symptoms of most being death.
Cities typically fine people for not mowing their lawns…
Only in the land of the free I think.
I’ve heard is said from many sources that the principle mission of a sheep is to try and get itself killed.
It’s therefore a constant battle against that will when it comes to trying to keep them.
Use a goat instead.
I think I just want a remote controller lawnmower – for the fortnightly (summer) and monthly (winter) effort lawnmowing requires, being able to drive it using an RC transmitter sitting on my balcony seems like fun.
From the CNC perpective, for suburban lawn sizes anyway, how about a giant XY cartesian frame? It wouldn’t have to be anything with great accuracy, so the rails could be something as simple as a row of bricks. You’d need one stiff beam to go across the yard. After that it’s just like a giant plotter.
I pretty much did this. Only I made it a FPS video game style deal. I sat in my office and mowed the lawn using the arrow keys on my computer while watching the live video stream.
Pi 2
PiCam
USB wifi adapter
Sabertooth motor controller
2x wheelchaor motors from ebay
Bolted together iron channel from Lowe’s for the frame (hey, it was a proof of concept)
and some chain + tires/wheels from Grainger to make it moble
NetCat
VLC
and some C/C++ to glue it all together.
I actually recently decided to go fully automated and bought 10x HM-10 to make iBeacons and then do the positioning based on the RSSI of those (I have 2+ acres to mow, I need some coverage and precision). But I like the idea of the $50 RTK chips mentioned earlier in the comments. That’s a serious “take my money now type item” for me.
You mean like Flymo?
http://www.flymo.com/uk/lawn-mowers/robotic/1200r/
Since we have miles of mowing at work each week, this would be great. That would allow us to free up about 30 hours of labor every week to something productive. Think of large places like golf courses. Think how much your local county uses to maintain right aways and such.
I just look forward to it so i don’t have to sneeze all summer long.
I hate Internal combustion lawn appliances. Noisy, troublesome and unreliable. So I cut out the middle man. Now I just throw the gas and oil directly on the lawn. Now I have a lot more free time.
I think we should approach this from a different angle: let’s genetically engineer the heck out of the grass such that it grows to a certain height and no taller. Perhaps even have it generate that cut-grass smell every now and then, so we don’t forget about it completely.
Here is a commercially available autonomous mower for golf greens.
https://www.youtube.com/watch?v=x3Ur_JVK8MY
If link does not work, look on YouTube for “Cub Cadet RG3 Benefits 2015”
No idea of the cost but obviously not in the budget range for the normal home owner.
I looked into this before I started building my own. This mower in the vid is about $70k and that doesn’t include the installation per whole. I have found some numbers on the web saying a 18 whole course is about 250k is setup. It also can cut up to 900m on a single charge iirc. Not for sure if the new version still uses the beacon technology but there is a research paper of the company before cubcadet bought them explaining how the beacon works pros and cons etc.
What is pretty amazing is golf courses still demand they use that, if they can afford it, because it cuts the area better than a human do so players sort of demand golf courses to use it. My 2 cents :D
Aw hell- just go on EBAY, get a used John Deere greenstar system and autotrac universal and slap it on a garage sale riding mower. Update the free (asterisk) software, and you have WAAS accuracy
My thought was a camera in the upstairs window running opencv and directing the red blob to stay on the green patch whilst making sure it’s covered the whole area.
That’s the path I think I would take. With cameras its conceivable to also monitor stray objects in the yard – ie pets and people.
We are all working on the wrong problem. Instead of modifying your lawnmower, modify the grass so that it won’t grow over 2″. No mower, No pollution, No wasted time.
Here’s the thing about a robotic lawnmower. It really doesn’t need to know where in the world it is. It does, however, need to know with excellent accuracy (maybe 2cm) where in the yard it is and with even better accuracy, where it is in relationship to features in the yard (think of edging). GPS is horrendously over-kill for the problem except that it provides the ability to position without any additional equipment.
In all cases the yard will have to mapped out as a setup step and the 3rd dimension must be taken into account – not all yards are flat and level.
Is there any reason WiFi, Bluetooth or some other wireless technology couldn’t be used to trilaterize from?
I have to say that I’m quite surprised that none of you mentioned ArduMower! It’s a German open-source project which includes everything needed to build a good autonomous lawnmower. They have a very sophisticated Arduino code (Mega 2560 is used) which has several mowing patterns, real-time monitoring and setup via a mobile app, buried fence detection, lawn/rain/drop/obstacle detection (obstacle detection via ultrasonic sensors, bump sensors, or motor current), encoders for the motors, current sensing, battery monitoring and autonomous return to station for charging, WiFi, GPS, RC remote, etc. They build the electronic part using easily available Arduino parts and sensors. They also have a webshop where you can purchase all the electronic and mechanic parts, including CNC cut chassis parts and the motors.
http://www.ardumower.de/index.php/en/
Now my experience building and ArduMower: I set out to build one for the smallest amount of money possible and therefore decided not to use the motors from their webshop. I used capable Chinese motors sourced from eBay and external encoders (600P), and I also used L298N drivers instead of their much more expensive dual MC33926 drivers. This is still an ongoing project, the first results are good but need some fine tuning. Currently, the biggest problem I have is with obstacle detection. The US sensors they use (HC-SR04) are very very unreliable so I opted to do obstacle detection via sensing motor current (the mower hits the obstacle (a tree for example) – the motor current increases, the blades can not reach the obstacle) but that also doesn’t work ritgh Instead of using ACS712 current sensors, I have to use something better, planning to use INA169 sensors.
Btw, the coolest commercial one I have seen is:
https://www.youtube.com/watch?v=j_sLsKf6S9U
Hi,
I am currently developing a small robot that draws on sand.
It will soon be ready.
Meanwhile here’s a try:
https://www.youtube.com/watch?v=UG6rtTHKjbA
GPS is overkill for small sized lawns. If you don’t care about striping / patterns it is better to keep it simple and a boundary wire is more than enough. Also remember that adding complexity to consumer products increases development costs exponentially. If at the end of the day a regular consumer is only willing to pay a $50 premium for nice striping or patterns, you will have a tough time making a business plan for such a product.
Of course, commercial big area mowing is another problem altogether and I believe a good localisation system is key. As showed above, the Cub Cadet RG3 is being used in golf course greens and uses local infrastructure to achieve high accuracies within golf greens. My company, TURFLYNX, has been focused on golf fairways using RTK GPS + onboard sensors for precise dead reckoning to fill in the locations where GPS is not good enough.
The first result of our efforts is the TURFLYNX F315. Take a look for yourselves:
https://www.youtube.com/watch?v=9W8I5fVBUs0
I’ve used the piski system before. It is indeed very accurate but it looses its signal way to easy. Driving under a tree or branch is enough to loose it. You can’t just rely on gps, you’ll need something to maintain location between when the gps connection drops.
“Armed with the distance from the satellite and the position of the satellite, the receiver essentially knows the radius of a circle”
You mean “sphere”.
If you get a position from one stationary known mobile phone, can you compare it with a moving one? Would that work? I already have a stationary android device sharing my WIFI hotspot. And I will want the lawnmower to report via WIFI anyway…
In the south, a trimmed lawn is a safe lawn… Spot the snake is a hard enough game as it is, throw in some foliage and it becomes: “Can I survive long enough to get the anti-venom?”
Any thoughts on smaller bots and swarming?
I’ve finally dove into this problem and I’m putting together a solution which is similar to other people. I created a quick POC of a drone flight controller with GPS RTK. The POC chassis is not great but it lets me test driving patterns on the lawn. https://youtu.be/TfpUY18d1FA . I will integrate the flight controller setup with a Evatech Goat 22 http://evatech.net/PRODUCT.php?ID=5 when it arrives in a few weeks. All and all its not inexpensive, but it will work for my 6+ acres I hope.
how did you make out bitdog??? id be interested in making it as I got big property to cut grass does it turn if if bumps into anything or finds a ditch it shouldn’t go down or the gps stuff so you can mark it
I’m actually working on making a zero turn rider autonomous right now. I’m planning on using the ublox zed-F9P. I already have a base station and rover (my truck just for triggering home automation….my dad always said some is good, more is better, and too much is enough!). In reality, I wanted to test it, and test it at distance. It works surprisingly well, even over cell networks. For the rider, I saw on hackaday, where a guy did this but complained of the linear actuator speed that he was using. He never got it to track quite right. I’m going with a different approach. Nema 34 motors activating the hydraulic valves the same way a human does, through rotation. Just finished simulating heat sinks for the motors as the max draw I’m targeting is 600W/motor! (6A motors, 100V). It takes 73 in-lbs to hold it open at full throttle! Thus the powerful motors! It’s probably overkill, but based on the other guys experience with slow positioning, I’m not going to risk it! Next I have to figure out how I’m actually going to mount said heat sinks….
I’m planning on doing some sort of video. I’ve only done a tiny bit of fabrication so far, so it’s not too late. Honestly I’m just trying to get through all the fabricobbling questions before I start favricobbling on video :)