[Nathan] needed an autonomous mower to help on the farm, so he built his own without breaking the bank. It might not be the prettiest machine, but it’s been keeping his roads, fences and yard clear for over a year. In the video after the break, he gives a detailed breakdown of its build and function.
It’s built around a around a simple angle-iron frame with a normal internal combustion push mower at it’s core. 18″ bicycle-type wheels are mounted at each corner, each side driven by an e-bike motors via long bicycle chains. Nathan had to add some guards around his wheel sprockets to prevent the chains slipping of due to debris.
Al the electronics and the battery is simply mounted on top of the frame, away from the motors to avoid magnetic interference with the compass. The brain of the system is a Pixhawk autopilot with a GPS module running ArduPilot, a staple for most of the autonomous rovers, boats and aircraft we’ve seen. The control station is just a Windows laptop running Mission Planner, with a 900 MHz radio link for comms with the mower. [Nathan] also gives a overview of how he uses a spreadsheet to set up waypoints.
This lawnmower’s straightforward design and use of easy-to-find components make it an excellent source of inspiration for anyone looking to build their own functional machine.
The rise of open source hardware has seen a wide variety of laborious tasks become successfully automated, saving us humans a great deal of hassle. Suffice to say, some chores are easier to automate than others. Take the classic case of a harmless autonomous vacuum cleaner that can be pretty dumb, bumping around the place to detect the perimeter as it traverses the room blindly with a pre-programmed sweeping pattern.
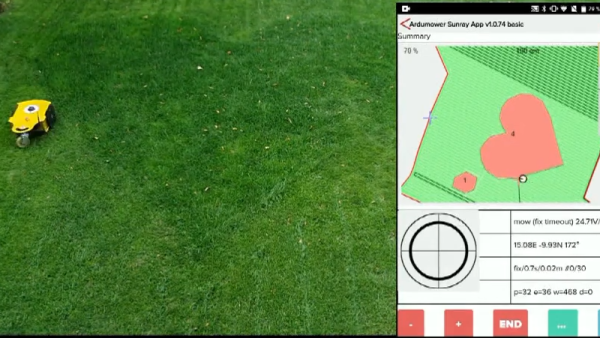
Now in principle, this idea could be extended to mowing your lawn. But would you really want a high speed rotating blade running rampant as it aimlessly ventures outside the perimeter of your lawn? The Sunray update to the Ardumower autonomous lawn mower project has solved this problem without invoking the need to lay down an actual perimeter wire. As standard consumer grade GPS is simply not accurate enough, so the solution involves implementing your very own RTK-GPS hardware and an accompanying base station, introducing centimeter-level accuracy to your mowing jobs.
RTK-GPS, also known as Carrier Phase Enhanced GPS, improves the accuracy of standard GPS by measuring the error in the signal using a reference receiver whose position is known accurately. This information is then relayed to the Ardumower board over a radio link, so that it could tweak its position accordingly. Do you need the ability to carve emojis into your lawn? No. But you could have it anyway. If that’s not enough to kick off the autonomous lawnmower revolution, we don’t know what is.
Mowing the lawn is one of those repetitive tasks most of us really wish we had a robot for. [Kenny Trussell] mowing needs are a bit more strenuous than most backyards, so he hacked a ride-on mower to handle multi-acre fields all on it’s own.
The mower started out life as a standard zero turn ride on lawn mower. It’s brains consist of a PixHawk board running Ardurover, an Ardupilot derivative for ground vehicles. Navigation is provided by a RTK GPS module that gets error corrections from a fixed base station via an Adafruit LoRa feather board, to achieve centimetre level accuracy. To control the mower, [Kenny] replaced the pneumatic shocks that centred the control levers with linear actuators.
So far [Kenny] has been using the mower to cut large 5-18 acre fields, which would be a very time-consuming job for a human operator. A relay was added to the existing safety circuit that only allows the mower to function when there is weight on the seat. This relay is wired directly to the RC receiver and is controlled from the hand-held RC transmitter. It will also stop the mower if it loses signal to the transmitter. To set up mowing missions, [Kenny] uses the Ardupilot Mission Planner for which he wrote a custom command line utility to create a concentric route for the mower to follow to completely cover a defined area. He has made a whole series of videos on the process, which is very handy for anyone wanting to do the same. We’re looking forward to a new video with all the latest updates.
This mower has been going strong for two years, but in terms of hours logged it’s got nothing on this veteran robotic mower that’s been at it for more than two decades and still runs off an Intel 386 processor.
Mowing the lawn is a chore that serves as an excellent character building excercise for a growing child. However, children are expensive and the maintenance requirements can be prohibitive. Many instead turn to robots to lend a hand, and [Rue Mohr] is no exception.
[Rue]’s creation goes by the name Mowerbot, and was first built way back in 1998. Steel angle and brushed DC motors are the order of the day, helping the ‘bot get around the garden and chop the grass down to size. Being of such a vintage, there’s no Raspberry Pi or Arduino running the show here. No, this rig runs on the venerable 386, chosen primarily as it can run off just 5 V. The original build ran off a 5 1/4″ floppy, though it was later upgraded to CF card storage instead.
It’s not the first robot mower we’ve seen, but is likely one of the longest serving. It’s still in use today, though [Rue] reports it’s due for some new batteries. Given it’s been chewing up the grass for over two decades now, that’s fairly impressive performance. We hope to see this 386-driven beast still cutting away long into the future.
As often happens while engaged in a mundane task, my mind wandered while I was mowing my small suburban plot of green this weekend. “Why, in 2017, am I still mowing the lawn?” In a lot of ways we’re living in the future — we walk around with fantastically powerful computers in our pockets, some of us have semi-autonomous cars, and almost anything can be purchased at the touch of a finger and delivered the next day or sooner. We even have robots that can vacuum the floor, so why not a robot lawnmower?
It’s impossible to know when society began to manicure its front lawns. Truth be told — cutting the grass was, and still is a necessity. But keeping the weeds at bay, trimming, edging and so forth is not. Having a nice lawn has become a status symbol of modern suburbia all across the globe. When the aliens arrive, one of the first things they will surely notice is how nice our front lawns are. This feature of our civilization could have only been made possible with the advent of specialized grass-cutting machines.
Reel Mower [Public Domain]It could be argued that the very first lawnmowers were live stock. The problem was they were quite high maintenance devices and tended to provide a very uneven cut, which did not bode well for families striving for the nicest front lawn on the dirt road. Coupled with the foul odor of their byproducts, the animals became quite unpopular and were gradually moved out of site into the back yards. Other solutions were sought to maintain the prestigious front yard.
The first mechanical lawnmower was invented in 1830 by a man named Edwin Budding, no doubt in an effort to one-up his neighbor, who still employed a Scythe. Budding’s mower looked much like today’s classic reel mowers, where a rotating cylinder houses the blades and rotates as the mower is pushed forward. Budding was granted a patent for his device by England, much to the dismay of his fellow neighbors — most of whom were forced to buy Budding’s mower due to the fact that everyone else in the neighborhood bought one, even though they weren’t actually needed.
By the early 1930’s, the cold war started by Budding and his neighbor had spread to almost every front yard on earth, with no end in sight. Fast forward to the modern era and the lawn and garden market did 10 billion in sales in 2014 alone. Technological advances have given rise to highly advanced grass-munching machines. For smaller yards, most use push mowers powered by a single cylinder IC engine. Many come with cloth bags to collect the clippings, even though everyone secretly hates using them because they gradually fill and make the mower heavier and therefore more difficult to push. But our neighbors use them, so we have to too. Larger yards require expensive riding mowers, many of which boast hydrostatic transmissions, which owners eagerly brag about at neighborhood get-togethers, even though they haven’t the slightest clue of what it actually is.
Us hackers are no different. We have front lawns just like everyone else. But unlike everyone else (including our neighbors) we have soldering irons. And we know how to use them. I propose we take a shot-across-the-bow and disrupt the neighborhood lawn war the same way Budding did 85 years ago. So break out your favorite microcontroller and let’s get to work!