In order to not hit something, you generally need to know where that thing is. On land, the meager human eyesight tends to be sufficient. On the water, however, the prospects are more dangerous and complicated. So, technology is required to ensure safe ocean voyages in the form of the AIS transponder system. The off the shelf solutions tend to work quite well, but [peterantypas] was displeased with the commercial offerings, and built what appears to be the first open source AIS transponder called MAIANA.
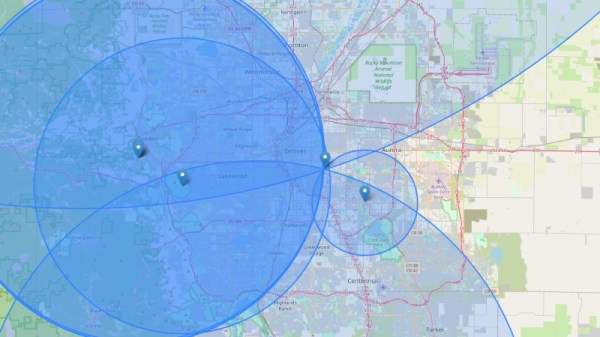
Automatic Identification System (AIS) is a GPS tracking system designed for maritime applications. Broadly speaking, it broadcasts GPS and other data at intervals over VHF radio. AIS is what allows the precise tracking of vessels by authorities, and online hobbyists. AIS is also often received by other vessels to augment radar improving boat to boat collision safety.
 Most commercial AIS transponders used by sailors are rather bulky, expensive, come with a large power budget. The MAIANA project avoids these pitfalls by being entirely self-contained. The RF portion is largely made up of a STM32L4 micro controller, a SI Labs Si4460 ISM RF chip, and a Quectel L76L-M33 with a Johansson ceramic chip antenna for GPS. With such simple hardware, the PCB is easily small enough to fit inside the antenna assembly.
Most commercial AIS transponders used by sailors are rather bulky, expensive, come with a large power budget. The MAIANA project avoids these pitfalls by being entirely self-contained. The RF portion is largely made up of a STM32L4 micro controller, a SI Labs Si4460 ISM RF chip, and a Quectel L76L-M33 with a Johansson ceramic chip antenna for GPS. With such simple hardware, the PCB is easily small enough to fit inside the antenna assembly.
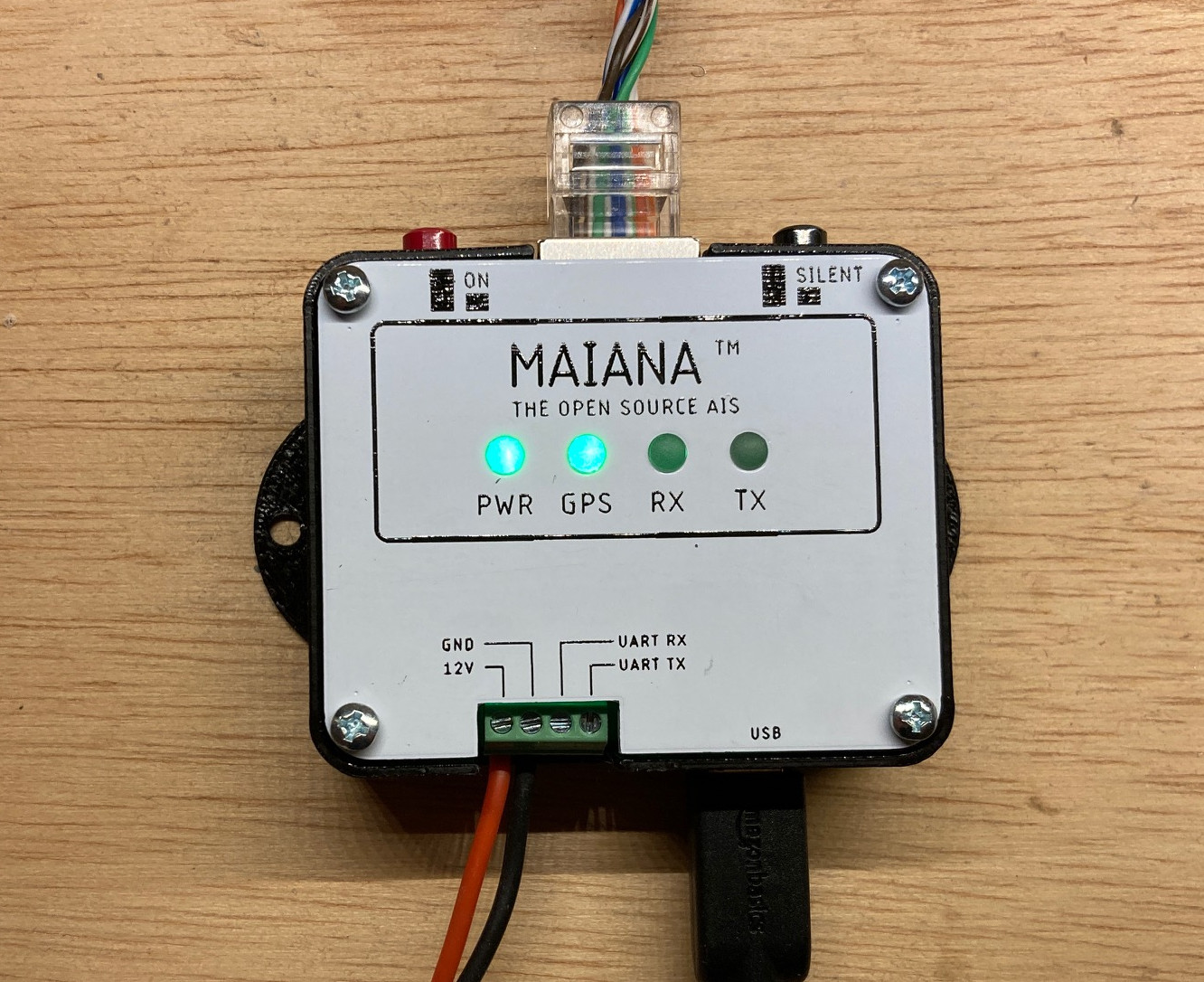
This design eliminates the need for long runs of multiple shielded RF cables to a bulky transponder unit inside. Instead, a simple Ethernet cable is used to transfer data to and from the mast. Inside the boat, a USB decoder is used to pass the AIS data on to a PC. This whole setup is remarkably simple and reliable, with hundreds of units having been produced since the project’s start.
While this is the first full blown AIS transponder we have covered, we have seen other projects utilizing the protocol. We have also seen quite a number of projects with the aircraft equivalent, ADS-B.
Thanks [Bernerd] for the tip!