
[Glytch] has been building drones since before they were called drones. Instead of submitting his time machine into the Hackaday Prize, he’s throwing his pocket sized, 3D printable coaxial drone into the ring.
 His focus is on designing small and very portable drones, preferably one that has folding arms and can fit into a backpack. His portfolio even includes a clone of the DJI Mavic, the gimbaled camera-carrying consumer drone known for its small volume when folded.
His focus is on designing small and very portable drones, preferably one that has folding arms and can fit into a backpack. His portfolio even includes a clone of the DJI Mavic, the gimbaled camera-carrying consumer drone known for its small volume when folded.
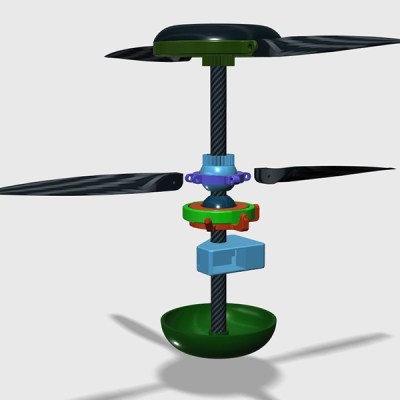
Navi — [Glitch]’s entry for the Hackaday Prize — is a complete departure from quadcopters with folding arms. It’s simple to use, and all he needs to do to launch it is hold it in the air and press a button. It does this by being a coaxial drone, or a cylinder with a pair of folding props sticking out the side. The chassis and mechanics for this drone are 3D printable, making this an awesome entry for the Hackaday Prize.

















But, Ascent Aerosystem’s Sprite has already done this…
Yes, but is Ascent Aerosystems *product* an open source, 3d printable, customizable bird? :)
I had talked with them a while back and showed them the project. They were interested in it and didnt seem put off by it at all. I’m not exactly aiming for their target market, or any market really. I wanted to make something that is much more accessible and aimed at search and rescue operations, as opposed to just general aerial photography for leisure and the like, and that’s what NAVI is :)
(Oh, and I never did say ‘First!’ ;P)
I’d love to see someone build a functional copy of the flying camera drone from the 1984 movie “Runaway”. Starred Tom Selleck, Cynthia Rhodes, Gene Stanley, and Kirstie Alley.
Gene Simmons, not Gene Stanley.
Nice work
Well I’ve never seen this before. Looks like you could fit it extremely compact.
Has Glytch considered playing with this swashplateless design?
http://hackaday.com/2014/12/16/uav-coaxial-copter-uses-unique-drive-mechanism/
I had seen that in the past and it looks extremely interesting. Would greatly simplify the physical construction of this build, allowing for a smaller physical size, as well as increased reliability. However I haven’t played with it yet. I do intend to have a go at it at some point in the future, when I can spend some time on it. Would allow for some very interesting possibilities in miniaturization and weight reduction :)
Another potential weight savings idea is to use a virtual gimbal like the parrot bebop.
I do have some ideas along those lines, using a ‘360’ (would probably end up being more like 220 degrees) camera! :)
Awesome project. I putzed about with coaxial UAV setups a few years ago for my HaD prize entry and learned a lot in the process (including that I don’t know much about aerodynamics). My word of caution, which sounds obvious but still holds true — weight is your enemy!
Awesome! What was your project?
And yeah with regards to weight, I’m doing everything I can to minimize it, within reason. My biggest concern is a bearing I had to get for the lower swashplate assembly. Its…rather overkill…Definitely need to look for a better suited bearing!
Hacks!
I want one!! what I really want is a 3d printer! One day maybe :(