For their final project in embedded microcontroller class, [Aaheli, Jun, and Naomi] turned their focus toward assistive technology and created an Electronic Travel Aid (ETA) for the visually impaired that uses haptic feedback to report the presence of obstacles.
We have seen a few of these types of devices in the past, and they almost always use ultrasonic sensors to gauge distance. Not so with this ETA; it uses six VL53L0X time-of-flight (ToF) sensors mounted at slightly different angles from each other, which provides a wide sensing map. It is capable of detecting objects in a one-meter-wide swath at a range of one meter from the sensors.
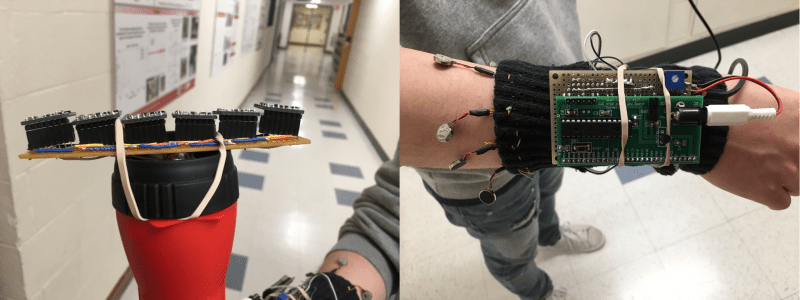
The device consists of two parts, a wayfinding wand and a feedback module. The six ToF sensors are strapped across the end of a flashlight body and wired to an Arduino Mini inside the body. The Mini receives the sensor data over UART and sends it to the requisite PIC32, which is attached to a sleeve on the user’s forearm. The PIC decodes these UART signals into PWM and lights up six corresponding vibrating disc motors that dangle from the sleeve and form a sensory cuff bracelet around the upper forearm.
We like the use of ToF over ultrasonic for wayfinding. Whether ToF is faster or not, the footprint is much smaller, so its more practical for discreet assistive wearables. Plus, you know, lasers. You can see how well it works in the demo video after the break.
This device is intended to augment the traditional white cane, not replace it. This virtual cane we saw a few years ago is another story.














I get the whole desire to develop assistive technology, but is this something that anyone really NEEDS?
It’s already a relatively tiny minority that are totally blind, and most of them (especially if they’ve been blind since childhood or even both) have more than adapted to their situation. So who is this for? Seems you’d be hard pressed to find a blind person who didn’t figure out how to keep from bumping into things without lasers in fairly quick order.
The world turns. And every day, more people are born blind or become blind or severely visually impaired. You yourself may end up having a blind child some day. We should do whatever we reasonably can to improve their quality of life in a visually oriented society.
Also, I see potential uses for this for non-blind people.
Right, but I’ve never met a blind person who was struggling to get around, especially if they were born blind. That’s their normal, they adapt. What is the advantage of becoming reliant on this technology when they’re own natural senses (touch, hearing) can make up for the deficit? Do we really want to create a group of blind individuals who can’t walk down a hallway unless they have their bionics charged and at the ready? That doesn’t sound like an improvement to the quality of their life.
It isn’t as if we have a population of blind people who can’t navigate hallways so they just sit around all day and atrophy. They’ve adapted without the need of technology (or at least, no technology more exotic than the stick mentioned in the post).
No technology more exotic than the stick? Nowadays, the blind are able to use all sorts of techno gadgets to help them enjoy the things that the rest of us do, and to lead a more normal life. Braille printers, screen readers… Should we just stop there?
I called an old friend of mine who is blind and told him about this haptic distance center, and emailed him the article which he can listen to with a screen reader. He thought it sounded really cool! He envisioned using it with a similar technique as a stick, but he thought that this might provide more relevant information about his surroundings. And he wouldn’t be hitting people and other things he shouldn’t with his stick.
Quality of life.
Sure blind people get around well enough & some are able to learn echo location but if this tool makes it easier, why not? A tool like this may make navigating new areas faster & increase mental mapping speed. Related, this is a final project not a medical device. The skills they have learned are transferable to robotics or other fields of employment.
People made it around on peg legs prior to motorized prosthetics but those certainly make life better if given the choice.
To answer your question: This hack looks quite effective and functional, portable, lightweight, inexpensive enough, very much worth pursuing a good deal farther. To qualify my response: I worked FOR a blind and deaf person a couple years and he was fine IN his own lab and home, but this developed more fully would grant the freedom to get out and about on the sidewalks and university corridors without an attendant, a LARGE change in capabilities as well as personal freedom. A simple cane grants only a limited upgrade to freedom.
I was at an airport waiting for a flight. I noticed a middle ages man just standing there that looked lost. I was bored so I asked if he needed help. I could tell he was blind when he answered. DFW was crowded and he said he was hungry but didn’t want to hot someone with his stick,I don’t know what it was called, and didn’t want to get run over. He grabbed my elbow and we walked to the Chili’s about 30 yards away.
This device would not have helped him find a restaurant but he could have walked through the airport without waking people.
The problem most blind people face is new environments, if this can help them ‘see’ places they dont know it sure has a purpose
I wonder if the slope is required for device to work properly, they could’ve fixed that.
The students did a good job, not only on the project itself, but also on the write-up and the video. Here’s some feedback:
(1) They go to the trouble of mentioning that they were inspired by work described in a patent, but forgot to give the patent number in their references.
(2) While they describe lots of circuit details, no where do they provide a comprehensive block diagram to set the context. This should have bee early in their write-up.
(3) Generally 9V batteries are a poor choice, given the high cost and low energy density. This design burns half their power in linear regulators. Was a 4.5V system from three AA cells considered?
(4) Was the need for opto-isolators to drive each vibrator motor really necessary? They should have described the problems in more detail.
(5) I understand the two-part tethered partitioning, but it seems cumbersome. Could the vibrating motors be incorporated into the handle of the flashlight sensor wand directly?
(6) Were they unable to locate a blind student to test drive the prototype or to provide desgn feedback?
Keep up the good work!