There was a time when a two-legged walking robot was the thing to make. But after seeing years of Boston Dynamic’s amazing four-legged one’s, more DIYers are switching to quadrupeds. Now we can add master DIY robot builder [James Bruton] to the list with his openDog project. What’s exciting here is that with [James’] extensive robot-building background, this is more like starting the challenge from the middle rather than the beginning and we should see exciting results sooner rather than later.

Thus far [James] has gone through the planning stage, having iterated through a few versions using Fusion 360, and he’s now purchased the parts. It’s going to be about the same size as Boston Robotic’s SpotMini and uses three motors for each leg. He considered going with planetary gearboxes on the motors but experienced a certain amount of play, or backlash, with them in his BB-9E project so this time he’s going with ball screws as he did with his exoskeleton. (Did we mention his extensive background?)
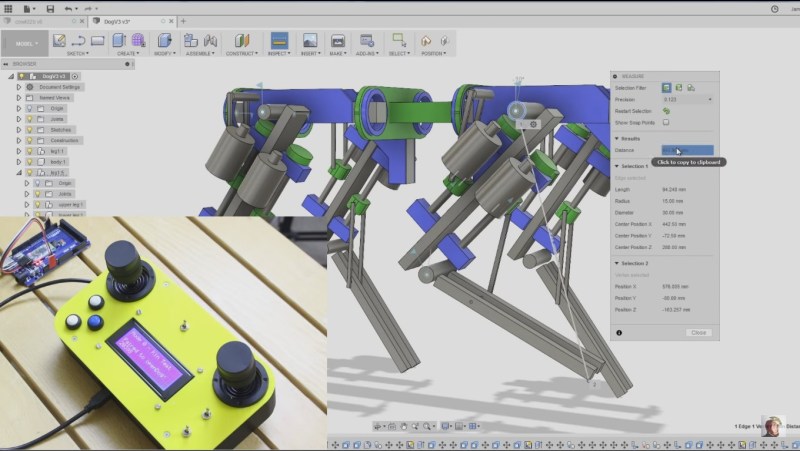
Each leg is actually made up of an upper and lower leg, which means his processing is going to have to include some inverse kinematics. That’s where the code decides where it wants the foot to go and then has to compute backwards from there how to angle the legs to achieve that. Again drawing from experience when he’s done it the hard way in the past, this time he’s designed the leg geometry to make those calculations easy. Having written up some code to do the calculations, he’s compared the computed angles with the measurements he gets from positioning the legs in Fusion 360 and found that his code is right on. We’re excited by what we’ve seen so far and bet it’ll be standing and walking in no time. Check out his progress in the video below.
As we said, more DIYers are doing quadrupeds. [Mike’s] robot dog is one such which we reported on just last month, but his hackaday.io page shows he’s progressed further since then. A smaller version, but already working great is the feline OpenCat. We look forward to the day when we see robotic cats and dogs in the same room and find out if electromechanical cats boss electromechanical dogs around the same way their biological counterparts do.














Why is every youtuber making a dumb face in the thumbnails these days? Is this appealing for some people?
The thumbnails are more like dumbnails, haha.
It’s youtubes algorithm. It prioritizes faces in the thumbnails, I agree the soy boy gape is pretty annoying. For a cooler project without the soy gape, check out Kevin Harrington’s open cat. (and I am a dog person myself) https://www.youtube.com/watch?v=qkjz2aVn8LQ
Eeeuuuuugh thanks for introducing me to the term “soy boy.” Man the internet is a truly gross garbage pit of pettiness and feces.
Oh great, and now Youtube is going to recommend alt-right bullshit to me in the sidebar for the next fifteen years because I once tried to look up what soy boy means.
Always open weird stuff in a porn window, not logged in. Youtube never forgives.
Cody (of Cody’s Lab on YouTube) said it was related to the algorithms YT is using whereby, if you had a face on the thumbnail (possibly gurning in some way), you were more likely to get onto the ‘trending’ listings.
Ha! We have a Lab(rador) named Cody!
I’ve always wondered if that is just because it attracts more people or if there’s an actual preference for faces encoded into the algorithm. Seems really weird that they’d have a coded preference for a certain type of thumbnail over other video quality metrics. I’d like to think the apparent preference for the youtube thumbnail gape is because it just attracts people rather than Google having included something actually looking at thumbnails.
That’s simply stupid. I subscribed to James’ channel anyways, however, not because of the stupid face he made but because of his good content.
Cody from Cody’s Lab mentioned that thumbnails with faces seem to be favored by the Algorithm and recieve more hits. Youtube might run face detection or humans just like to see excited faces.
It might also just be some random ill-founded runmour that youtubers are jumping on.
its not YT algo, this is brain clickbait, works on base psychological level
https://openspace.sfmoma.org/2018/04/your-pretty-face-is-going-to-sell/
People telling you Google AI is somehow sophisticated enough to prioritize stupid faces are LYING, and take you for a fool. This is the lowest level clickbait, right next to “x things …., 3 will shock you”.
Huh, this is exactly the sort of thing that even off the shelf vision models do well. Take the bottleneck layer and feed it as a signal to the ranker, it would absolutely discover things like stupid expressions on peoples faces are more clicky.
Because big data and its Algorithms are now playing for the virtual world the same role mother nature was playing for the real world. Yet, there are big differences between Algorithms that Nature are:
– Nature is not uniform, and is very complex. Platforms are just a few, and their Algorithms are very simple, so we lose in diversity.
– Nature pruning is working with local populations, Algorithms are working with the whole pool. When you have a huge pool, the average will be very low, so there is a tendency to dumb everybody down.
– Nature prune away the worst, but does not cap the best. Algorithms prune away all outliers, worst and best. Thus, AI Algorithms promotes mediocrity and kill the elites by making them invisible.
Of course, there is no conspiracy here, and no master plan to rule the world. It is nothing more than just the sloppiness of an infant AI combined with Big Data and our current Attention Driven Economy.
It would take a while to pull ourselves out from The Chase of the Clicks era. Till then, welcome to the weird faces era, and enjoy its funny dumb results while keeping an eye on our next serious interference with natural selection: direct genome editing. Remember BioShock? Can’t wait to see a city of Rapture for real but without the dark side, of course.
:o)
https://www.youtube.com/watch?v=8dc1cttiu6E
Well, it’s better than the thumbnails which are not within the video, but just click bait.
And how long till he teams up again with Colin Furze and jumbo sizes it in steel girders.
That I want to see!
Fatal flaw on dynamic system like that is TOO MUCH rigidity.That ball-screw is heavy, and will stay in place with unexpected external force, so guess what snap like matchstick? Much better solution is to relay on magnetic cushion or hydraulic check valves, exactly why BD choose it.
Can’t wait to see how that works for your robot.
Ah, creative answer no.7. Looks like anyone, can’t any more, give thoughts on something. Very encouraging for future progress.
Analog:
X: that shape doesn’t make a good wing, that’s why airplane manufacturers use traditional shapes.
Y: and where’s your airplane?
He has experience with series elastic actuators. https://www.youtube.com/watch?v=-deICvHVo5A
ball screws? looks like he is making robot turtle, not a dog
+1
I got some speedy screws that move 30mm per rotation. They move pretty quick on my pick n place. But the ones this guy has look regular so yes i agree lol
Looks like he’s running direct drive from some pretty beefy brushless motors, so I doubt speed will be an issue.
[James Bruton], thank you for sharing. Awesome approach and you really are showing how it should be done!
My thoughts are on Kinematics. With a rigid spine and only lateral rotation along the axis of the spine, isn’t your dog going to be forced to “crab turn” to change direction? Wouldn’t a better rotation direction be rotating horizontally at the “hip joints? (Direction blades on a quadracopter turn) That way you could turn the legs in the direction you wanted to go. (Would have to limit degree of rotation to prevent losing balance)
Hmmm… I think that’s handled by the 3rd motor for each leg. See James’ video at 2:26. That motor rotates the hole leg in and out. I don’t know if Boston Dynamic’s SpotMini has what you suggest (assuming I correctly understand what you’re describing) but I do know that they have the same 3rd axis which James is planning on. Looking at their latest SpotMini video at 0:27 (see below) it seems to turn left by using that 3rd axis to pull the left-rear leg inward and then push the left-front leg outward. At least that the best I can see by looking at the video.
[youtube=https://youtu.be/Ve9kWX_KXus?t=27s&w=470&h=295]
Dang that’s impressive.
Yeah, I agree he uses the same as Boston Dynamics. I was wondering if instead of that joint moving up and down it moved forward and back. No argument the BD handles the corners, just missing the grace of a dog or cat. Other than a dog reason for “lifting it’s leg” I don’t see how that axis of motion is needed for movement.
Remember that cats and dogs have flexible spines as well, which neither SpotMini nor jimDog from this article have.
On another note: my dog could go down stairs forwards.
Plantigrade with more joints.*
*BD more like ostrich.
At some point he’ll need to design a body for it, may I suggest Dr. Who’s K-9?
The mechanical dog of Fahrenheit 451 fame is near.
I read that book decades ago, I don’t remember the dog…
wait, did it track down “criminals” and have a video feed to entertain the tranqs?