When we want to build something to go where wheels could not, the typical solution is to use tracks. But the greater mobility comes with trade-offs: one example being tracked vehicles can’t go as fast as a wheeled counterpart. Information released by DARPA’s ground experimental vehicle technology (GXV-T) program showed what might come out of asking “why can’t we switch to tracks just when we need them?”
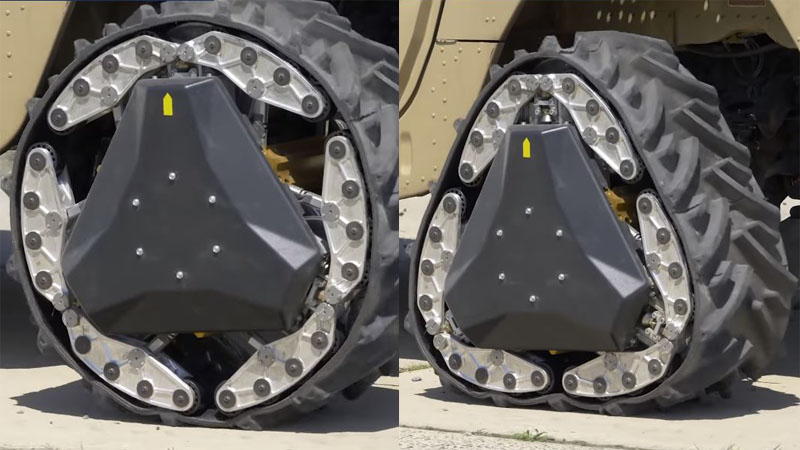
This ambitious goal to literally reinvent the wheel was tackled by Carnegie Mellon’s National Robotics Engineering Center. They delivered the “Reconfigurable Wheel-Track” (RWT) that can either roll like a wheel or travel on its tracks. A HMMWV serves as an appropriate demonstration chassis, where two or all four of its wheels were replaced by RWTs. In the video (embedded below) it is seen quickly transforming from one mode to another while moving. An obviously desirable feature that looks challenging to implement. This might not be as dramatic of a transformation as a walking robot that can roll up into a wheel but it has the advantage of being more immediately feasible for human-scale vehicles.
The RWT is not the only terrain mobility project in this DARPA announcement but this specific idea is one we would love to see scaled downed to become a 3D-printable robot module. And though our Hackaday Prize Robotics Module Challenge has already concluded, there are more challenges still to come. The other umbrella of GXV-T is “crew augmentation” giving operators better idea of what’s going around them. The projects there might inspire something you can submit to our upcoming Human-Computer Interface Challenge, check them out!
[via The Drive]














Looks like something that would give the 4WD industry a run for it’s money.
It died when they ended the Defender
It shoots the HumVee’s ground clearance all to Hell!
B^)
Earlier in the video they show two different crew awareness projects.
I think the 360 degrees with cameras with Head Up Display was way better than the one that 3D re-imaged the surroundings.
we didnt get to see hat the glasses HUD looked like, probably shit
and 3D reconstruction one gives you mapping for free, can be augmented by drones etc
The 3 speed gearbox, electric motor and brake inside the wheel hub (earlier in the video) was amazing!
But 100KW? For all 4/6 wheels?
I believe that’s 100kW per wheel.
Yeah, amazing. Whatever happened to the mantra of “unsprung weight, unsprung weight, unsprung weight”?
I believe whoever came up with that phrase is an unsung hero.
B^)
I don’t think ride comfort is a priority for this vehicle.
It’s hard on the mounting points as well to have lots of mass hanging off of the suspension.
I think the Humvee would be okay with it
The Transformer-Mattracks are going to be just as bad if not worse. At least the wheel motors can accommodate a real tire.
Right? And I thought adding a steel fender directly to my motorcycle’s rear swimg-arm posed a problem with unsprung mass. I don’t think I have much to worry about now.
That wheel->track conversion hardly improves the ground pressure at all. Perhaps a 2:1 reduction.
Airing down the tires from 35psi->7psi give a 5:1 reduction and is essentially free. I think the normal tire setup is capable of being reduced to as little at 2psi.
At 2psi a 20″x10″ contact patch (probably much larger than these tires are capable of) would only provide 400lbs of support. I’m going to guess that a four wheel vehicle is a bit heavier than 1600lbs.
It’s a good point but typical tire sizes just can’t flatten out enough to give you more contact area.
The tires are much larger than that. 37″ x 12″ before the start flattening out. Easily 20″x20″ @ 2-3PSI and the sides of the tires are also providing support in soft material.
The other issue with the triangular design is that the leading edge is sharper than a round tire and that could cause it to burrow under soft material rather than push it down.
> The other issue with the triangular design is that the leading edge is sharper than a round tire and that could cause it to burrow under soft material rather than push it down.
You may wish to take a look at the usage of the tri-tracked add-ons for vehicles.
I wonder what a tire filled with a non newtonian fluid would behave like, maybe even a fluid that changes with temperature as well. Would it be near solid at very high RPM and squishy at lower RPM for extra grip.
There’s no comparison in the size of the contact patch. The tri-track design has way more. And without the control distortion as the rim migrates around when floating on top of a partially deflated tire.
Also interesting is that it’s track doesn’t have the tire’s energy robbing deform/reform of forming the contact patch, which is even grossly higher on a partially deflated tire.
They’ve proven the concept, now they can work on improving it.
I think the Landmaster’s wheel geometry makes more sense then this mechanical mess.
https://youtu.be/ZZYT2nYd46o
They’re both a mess.
Neat, but a mess.
Tracked vehicles like the M1 are a thing for a reason.
I’m just imagining cornering traction with either setup. Scary as hell.
I was wondering if those wheels made anyone else think of that movie. I couldn’t remember the names of the vehicle though.
Comments in the video say that Lockheed patented the 3 wheel design in the 1960’s.
Damnation Alley if memory serves.
dat system complexity and logistics tail tho
anyone else noticed that when its in the wheels mode, they are completely unbalanced? the wobble wobble every revolution of the wheel, I hate to be the one to balance them on a wheel balancer…
That transforming wheel looks great, until you imagine it operating in thick river clay. Then it’s an accident waiting to happen.
In fact, I appreciate the efforts made to share knowledge. The subject found here was really effective for the subject which I have been researching for a long time.