One-wheels use motion-tracking hardware and fine motor control to let you balance on a single wheel. That’s neat and all, but [Michael Rechtin] had another idea in mind—what if a one-wheel used a track instead?
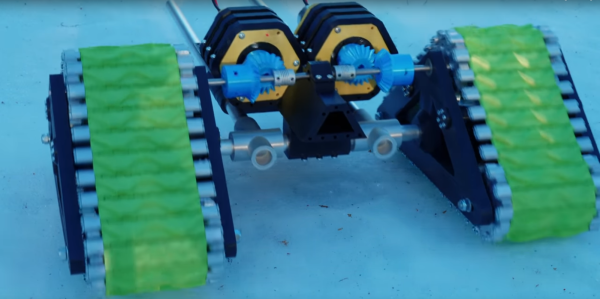
The idea behind the track was to make the one-wheel more capable on surfaces where wheels simply can’t compete. The tracked drivetrain was largely 3D printed, including some massive gears that are supplemented by a big old 150 mm ball bearing which sits around the drive motor itself. If you love planetary gear trains with a 4:1 reduction, this project is for you. Carbon-fiber reinforced filament was used for many of the parts to give them some additional strength. Control is a little different than a traditional one-wheel, since the flat-bottomed track means lean controls won’t work. Instead, a wireless hand throttle was constructed to enable the rider to command the direction of travel.
It’s not easy to ride, but the one-track does actually work. It’s capable of crawling its way around on grass and snow quite well. There were some issues with the printed tracks and rollers, particularly when turning, but tweaks to round out the track profile helped solve that issue to a degree. There’s a reason we often use wheels instead of tracks, but somehow tracks are still just cool.