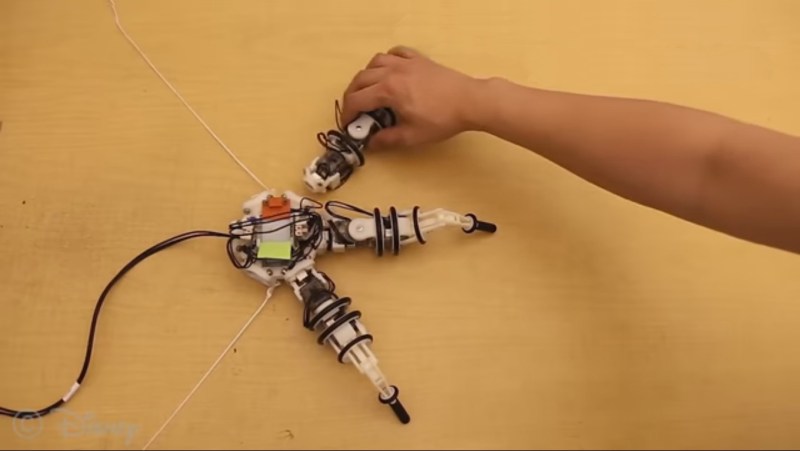
Disney is working on modular, intelligent robot limbs that snap into place with magnets. The intelligence comes from a reasonable sized neural network that also incorporates some modularity. The robot is their Snapbot whose base unit can fit up to eight of limbs, and so far they’ve trained with up to three together.
The modularity further extends to a choice of three types of limb. One with roll and pitch, another with yaw and pitch, and a third with roll, yaw, and pitch. Interestingly, of the three types, the yaw-pitch one seems most effective.
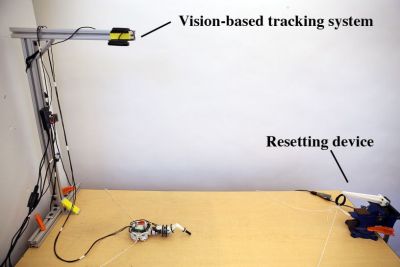 In this age of massive, deep neural networks requiring GPUs or even online services for training in a reasonable amount of time, it’s refreshing to see that this one’s only two layers deep and can be trained in three hours on a single-core, 3.4 GHz Intel i7 processor. Three hours may still seem long, but remember, this isn’t a simulation in a silicon virtual world. This is real-life where the servo motors have to actually move. Of course, they didn’t want to sit around and reset it after each attempt to move across the table so they built in an automatic mechanism to pull the robot back to the starting position before trying to cross the table again. To further speed training, they found that once they’d trained for one limb, they could then copy the last of the network’s layers to get a head starting on the training for two limbs.
In this age of massive, deep neural networks requiring GPUs or even online services for training in a reasonable amount of time, it’s refreshing to see that this one’s only two layers deep and can be trained in three hours on a single-core, 3.4 GHz Intel i7 processor. Three hours may still seem long, but remember, this isn’t a simulation in a silicon virtual world. This is real-life where the servo motors have to actually move. Of course, they didn’t want to sit around and reset it after each attempt to move across the table so they built in an automatic mechanism to pull the robot back to the starting position before trying to cross the table again. To further speed training, they found that once they’d trained for one limb, they could then copy the last of the network’s layers to get a head starting on the training for two limbs.
Why do training? Afterall, we’ve seen pretty awesome multi-limbed robots working with manual coding, an example being this hexapod tank based on one from the movie Ghost in the Shell. They did that too and then compared the results of the manual approach with those of the trained one and the trained one moved further in the same amount of time. At a minimum, we can learn a trick or two from this modular crawler.
Check out their article for the details and watch it in action in its learning environment below.
Our thanks to [Jarrett] for tipping us off about this.














https://www.youtube.com/watch?v=D6kNl5it9L4
:o)
https://youtu.be/ipYSWeV599s?t=108
:)
Does anybody else wonder what possible things this could mean for the adult market?
Why Disney, is all I’m wondering..
People are expensive. Disney dreams of IRL Westworld. Grant Imahara works for them now doing this:
https://www.youtube.com/watch?v=ENa98h7M7qY
I wont be surprised if/when Disney buys Boston Dynamics.
That will be something else…locked into the vault.
I think it’s a preview of the robot villain from the sequel to Big Hero Six.
They’re going to train them to get all the good coins out of the water, as robots aren’t affected by the heavy curses laid on them so long ago.
The treasure is cursed, people. Look it up!
Now I feel like a shit. I looked it up and they scoop it all up and give it to charity! Doh. :|