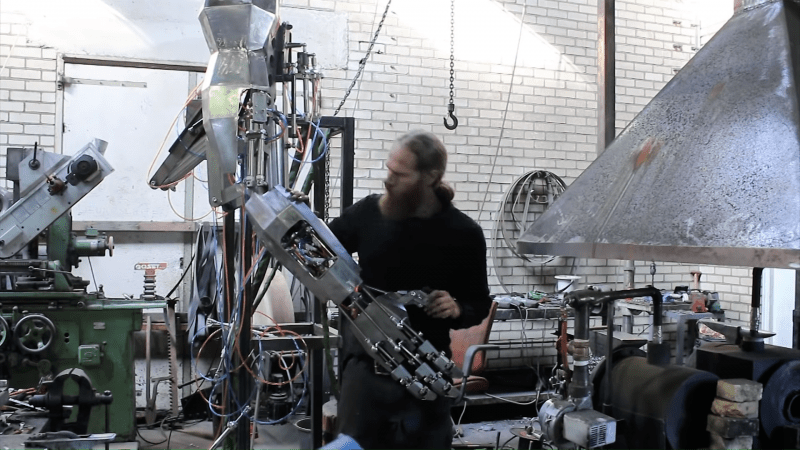
Fair warning that [Freerk Wieringa]’s videos documenting his giant non-electric robot build are long. We’ve only watched the first two episodes and the latest installment so far, all of which are posted after the break. Consider it an investment to watch a metalworking artist undertake an incredible build.
The first video starts with the construction of the upper arm of the robot. Everything is fabricated using simple tools; the most sophisticated tools are a lathe and a TIG welder. As the arm build proceeds we see that there are no electronic controls to be found. Control is through hydraulic cylinders in a master-slave setup; the slave opens a pneumatic valve attached to the elbow of the arm, which moves the lower arm until the valve closes and brings the forelimb to a smooth stop. It’s a very clever way of providing feedback without the usual sensors and microcontrollers. And the hand that goes at the end of the arm is something else, too, with four fingers made from complex linkages, all separately actuated by cylinders of their own. The whole arm looks to be part of a large robot, probably about 3 or 4 meters tall. At least we hope so, and we hope we get to see it by the end of the series.
True, we’ve seen terrifyingly large robots before, but to see one using fluid power for everything is a treat.
Thanks to [Bald Power] for the tip.














You can find the described Master-Slave principle also in the control of at least some our muscles. There are muscle-spindles which contain stress-receptors and small muscle fibers. When this small fibers contract, the stress receptive fibers send signals to your spinalcord, where a reflex (like the reflex you know, when the doctor hits above your knee with a small hammer and your leg jerks) activates the bulk of the muscle to contract and thus the stress receptive fibers do not send a signal any longer as they are not stretched any more.
“True, we’ve seen terrifyingly large robots before, but to see one using fluid power for everything is a treat.”
I imagine the extension cord is the biggest issue.
hmmm… if hydraulics are your thing. And if you want direct control of the arms then you must also like the widely used “excavator”, available in many colors mostly yellow.
But seriously now, I like the concept and I really appreciate the effort, time and money that is being spend on this project. It certainly looks cool and I’m sure it will be fun to “play” with. The way it is to be controlled also seems very practical and makes a lot of sense to me.
Cool project!
For something to be listed as hydraulic , I hear a lot of pneumatics.
“the most sophisticated tools are a lathe and a TIG welder.”… How about an MIG?
Very cool. Though the design seems more artistic than practical. That’s a lot more rand machining than I would expect. The amount of jostle also presents an issue, would due better if the system has some kind of counter force.
Terminator is coming!