Robots that can jump have been seen before, but a robot that jumps all the time is a little different. Salto-1P is a one-legged jumping robot at UC Berkeley, and back in 2017 it demonstrated the ability to hop continuously with enough control to keep itself balanced. Since then it has been taught some new tricks; having moved beyond basic stability it can now jump around and upon things with an impressive degree of control.
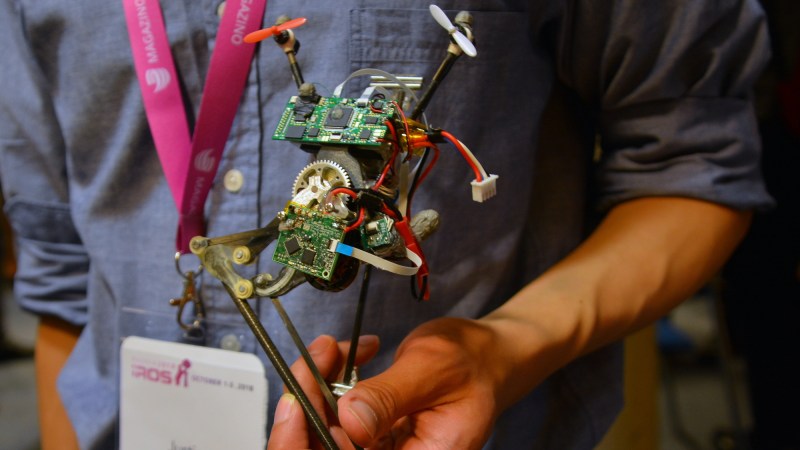
Key to doing this is the ability to plant its single foot exactly where it wants, which allows for more complex behaviors such as hopping onto and across different objects. [Justin Yim] shows this off in the video embedded below, which demonstrates the Salto-1P bouncing around in a remarkably controlled fashion, even on non-ideal things like canted surfaces. Two small propellers allow the robot to twist in midair, but all the motive force comes from the single leg.
Part of the challenge lies in the fact that the only opportunity to exert any real control over the robot’s next move is in the tiny slice of time during which the foot actually touches the ground. After that, it’s just physics playing out whatever got set up. Much of the work for movement planning is done with the help of motion capture, but researchers are working on improving things even more, and moving away from the need for such external dependencies.
If a machine doesn’t need to control where it goes, it could even get away with a single motor and no sensors like Runner does. We’ve even seen a wheeled robot prove that jumping doesn’t need legs.














Un Freaking Believable. Thanks for finding this.
They’ve been busier than a one-legged robot in a…
Leg factory! ????
Shiny metal ass kicking contest?
The movement looks good, but the thrusters take away a little of the awe for me – sometimes there is a course change midair, like in platformer video games – it would have been nicer if they relied completely on pendulums. Currently it’s more of a hopping/quadcopter hybrid.
I believe the thrusters are only there as a stand-in for a 90 degree rotated pendulum. Placing an extra pendulum would crash it against the first pendulum. Making 2 smaller (but heavier) would fix this.
Replacing the propellers with a pendulum would look more impressive indeed.
The thrusters perform some of the functions provided by arms on people as they walk, and cats as they fall, so its not a spoiler for me.
I think that we need to attach a lamp to the top of the robot and find a way to have it pop a ball by jumping on it.
+1
Anyway… this is really impressive, did not expect it to jump this high and smooth. Cool project!
A video showing the spinning thing https://www.youtube.com/watch?v=cjUYriUKUdU
One leg robots have been around a while. https://www.youtube.com/watch?v=XFXj81mvInc
Back to 2016, without propellers and cannot land https://www.youtube.com/watch?v=wxexoj1gKoo
I wonder how efficient it is given that overall it isn’t going anywhere it should be possible to recover most of the energy.
What would be really impressive would be to see it do that on a pebble beach but I reckon they are a few generations off anything like that.
A swarm of moon jumpers, (of course the props would not be needed, but some kind of gas thrusters), able to recovery most of the energy form the landings, and cover long distances, much more efficiently than clumsy rovers. Slow landing, along with computer vision, would allow them to carefully select where they land.
And some mechanisms to bounce back on their foot if they fall aside.
As far as I can see, they use the thrusters to turn/not turn the robot on its z-axis.
Could use reaction wheels. The vertical spinning bar pretty much already is one.
I saw a one legged hopping robot in tv in the mid-late 80’s. I believe it was from the MIT leg lab.
I was thinking of the something similar also – though quiet as as refined as this.
Remind me of the Hopping Lantern from Spirited Away.
I don’t think the parts for that thing came from China with 2 month free shipping.
Imagine two legs like that: how fast it could run!
It would probably be tripping all over itself.
(tongue in cheek comment – not to be taken seriously)
That could be a proper sprinting robot.
I’d really like to know how they get the energy into the system. To see it spring into the air from stationary is quite impressive, but then it’s able to add height to its successive bounces as well.
The leg is a series-elastic actuator, so they’re literally using a motor to spin up an elastic band while it’s in the air, in preparation for releasing it all at once as it hits.
Unfortunately, they also make use of external machine vision in that demo to calculate + control the robot :(
You could eventually replace that with on-board sensors of whatever type, and onboard processing. It just might take 20 years for the right parts to arise. But while we wait for those things to develop, why not start working on the leg part now? Fill in for the impossible bits, so that when the sensors arrive, we’ll have mastered the leg part, and we can all have one-legged robot butlers bouncing off our walls, spilling tea everywhere and terrorising pets into catatonic seizures.
Agreed! It’s still super cool! Just slightly less-cool than a bouncing robot you can unleash on the streets
Coincidentally, YouTube suggested a video from Disney Labs: https://www.youtube.com/watch?v=M0ZXmGRCuts. This one is voice coil and springs in parallel.
Please refer to paper when available!!!!
https://people.eecs.berkeley.edu/~ronf/PAPERS/dhaldane-iros17.pdf&ved=2ahUKEwjRjqfWv5XeAhUNlYsKHYmMBrkQFjAXegQIABAB&usg=AOvVaw0X9Rqu1_c20VgiadbLcW6o&cshid=1540054972197