When we think of pneumatic actuators, we typically consider the standard varieties of pneumatic cylinder, capable of linear motion. These can be referred to as “hard” actuators, made of rigid components and capable of great accuracy and force delivery. However, “soft” actuators have their own complementary abilities – such as being able to handle more delicate tasks and being less likely to injure human operators when used in collaborative operations. The Whitesides Research Group at Harvard University has undertaken significant research in this field, and released a paper covering a novel type of soft pneumatic actuator.
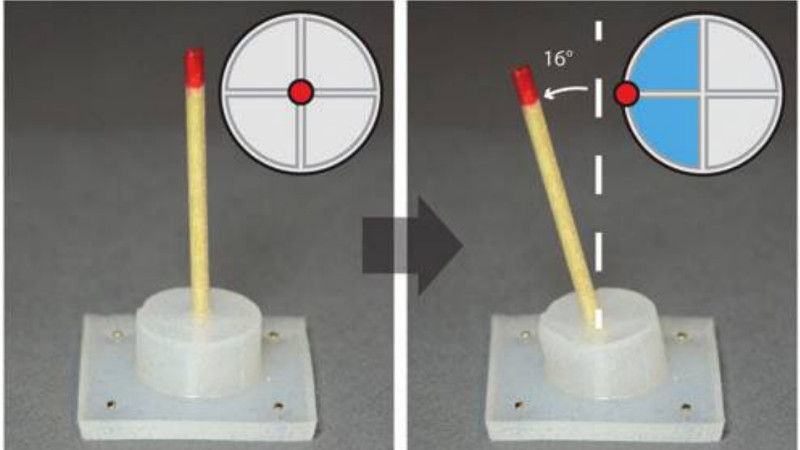
The actuator consists of a series of soft, flexible sealed chambers which surround a wooden dowel in the center. By applying vacuum to these various chambers, the dowel in the center can be pulled into up to eight different positions. It’s a unique concept, and one we can imagine could have applications in various material processing scenarios.
The actuator was built by moulding elastomers around 3D printed components, so this is a build that could theoretically be tackled by the DIYer. The paper goes into great detail to quantify the performance of the actuator, and workshops several potential applications. Testing is done on a fluid delivery and stirring system, and a tethered robotic walker was built. The team uses the term cVAMS – cyclical vacuum actuated machine – to describe the actuator technology.
The world of soft robotics is a hot bed of development, and we look forward to further work in this field. It’s not just Harvard, either – we’ve seen interesting work from Yale and from the Hackaday community too!














” However, “soft” actuators have their own complementary abilities – such as being able to handle more delicate tasks and being less likely to injure human operators when used in collaborative operations. ”
First law of soft robotics:”Thou shall not snap anything off one’s user”.
I much prefer your wording of the first law.
Snap.
So that’s what they call it.
Presumably they can be made bigger and then they’ll be slightly less useless, unless I’m missing something and we desperately need a stick that wobbles about, and yes I did see the walker and the fluid stirrer, these are things we’ve already mastered with less pipes.
Think: teledildonics.
That’s an actual term.
We are already witnessing the advent of next gen devices that can do things that are “best not mentioned”. These devices form the highly anticipated “don’t-ask-don’t-teledildonics” product category.
Or do this in reverse: a soft joystick, with direction sensing via 4 pressure transducers attached to those chambers. Probably laggy as f**k but should be able to work safely in extreme, e.g. flammable/explosive environments.
i was actually thinking about using this for force feedback. then a vector hall sensor in the base would measure stick position. a soft actuator would provide the necessary feedback without putting so much torque on the stick that it would be very difficult to fight it.
Am I the only who thought of vacuum windshield wiper motors, when they read rotating pneumatic actuators? I thinkthis would require the same amount of tubing that a hydraulic system would to do the same work. I’d to think the feedback would be horrible when precise control is required as much elaticity would be when, as I take the goal is, to mimic animal muscles.
Many cars of old had vacuum operated windshield wipers, door locks, headlight lifters… because there’s a ready source of suction in the engine intake.
It never worked very well.
It’s a nice concept, but if i’d had to guess when this was invented i’d have pointed to somewhen in the 1800s. It’s either a case of reinvention or a serious lapse on the side of the bellow-kings of olden times.