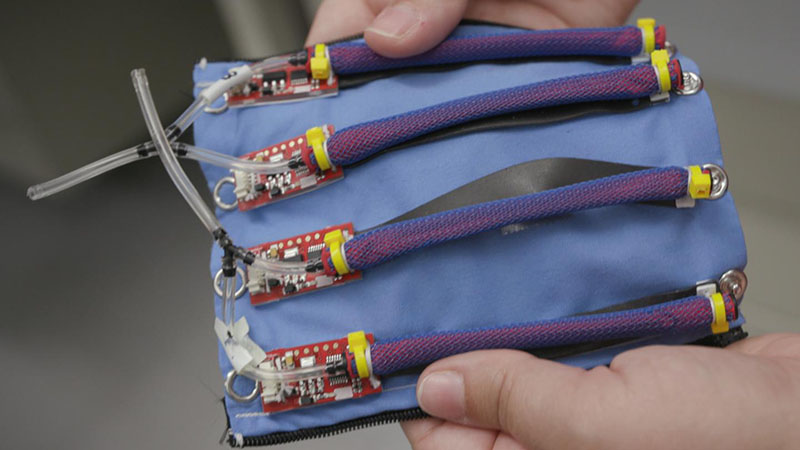
Despite what we may have seen in the new Winnie the Pooh movie, our cherished plush toys don’t usually come to life. But if that’s the goal, we have ways of making it happen. Like these “robotic skins” from Yale University.
Each module is a collection of sensors and actuators mounted on a flexible substrate, which is then installed onto a flexible object serving as structure. In a simple implementation, the mechanical bits are sewn onto a piece of fabric and tied with zippers onto a piece of foam. The demonstration video (embedded below the break) runs through several more variations of the theme. From making a foam tube (“pool noodle”) crawl like a snake to making a horse toy’s legs move.
There’s a serious motivation behind these entertaining prototypes. NASA is always looking to reduce weight that must be launched into space, and this was born from the idea of modular robotics. Instead of actuators and sensors embedded in a single robot performing a specific function, these robotic skins can be moved around to different robot bodies to perform a variety of tasks. Such flexibility can open up more capabilities while occupying less weight on the rocket.
This idea is still early in development and the current level prototypes look like something most of us can replicate and improve upon for use in our projects. We’ve even got a controller for those pneumatics. With some more development, it may yet place among the ranks of esoteric actuators.
[via Engadget]













Now, how do you generate compressed air or hydralic preassure in a lightweight, silent and energy/cost efficient manner? Thats the only thing i can think of when i see those type of solutions..
Yes, yes, now where are you going to find a reasonable source of pressure differential in space? I mean, look out the window, it’s nothing but an endless vacuum out there!
The trick is just bringing enough low mass, pressurized or condensed material which can phase change at a useful temperature, and a method of releasing it without altering your course. Or perhaps to store it after phase change and utilize it as steering or propulsion material. One wouldn’t want to use the actual fuel or oxidizer inside the craft of course.
internet comments
burritos
politicians
and that’s just what I thought of in the time it took to open the comment window…
https://playevolution.files.wordpress.com/2011/08/img_2012-copy.jpg
Hide them in plain sight: carefully choose the animatronic you’ll build.
when I read “robotic skin” I didn’t expect a piece of cloth with some hoses… BUT my curiosity won so I watched the video and the idea is very interesting. It really doesn’t matter if the “skin” is a piece of cloth or a piece of high-tech plastic film. And it doesn’t matter if it uses memory metals, superduper servo’s or a piece of hose. What does matter is that it does the trick and the fun thing is that it seems to work. Perhaps not in the terminator or robocop style you might want to see, but just a little bit more realistic and a lot more practical.
So, hackaday, thanks for making me think.
As someone with severe back pain I’d love to try the posture sensing aspect of this. I’m sure it would help so many people in the same or similar situation as me. Someone please make this available to us all for hacking etc….
In the video, she said a person could “do this on the fly”
I suspect sex toy manufacturers are considering ways to “do this on the fly” of someone’s jeans.