We’ve always had a soft spot for omni wheels and the bots that move around somewhat bumpily on them. Likewise, CNC pen plotters are always a welcome sight in our tip line. But a CNC plotter using omni wheels is new, and the results are surprisingly good.
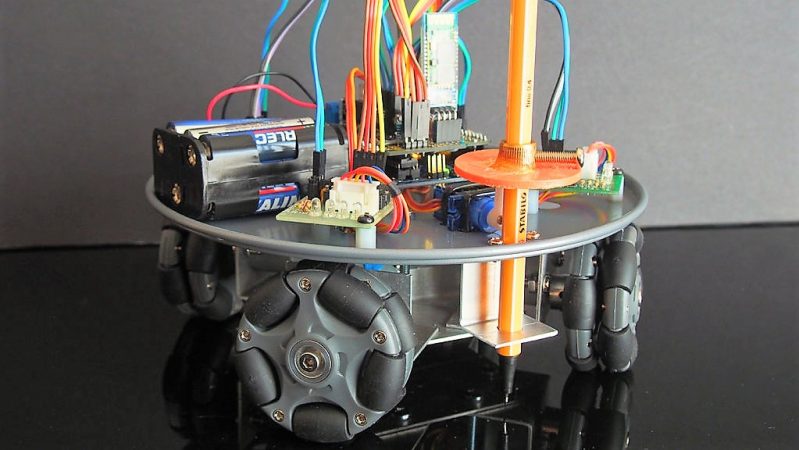
Built from the bottom of a spring-form baking pan, [lingib]’s plotter is simplicity itself. Four steppers turn the omni wheels while a hobby servo raises and lowers the pen. The controller is an Uno with a Bluetooth module for smartphone control. Translating wheel rotations into X- and Y-axis motions was not exactly trivial, and the video below shows the results. Lines are a bit wobbly, and it’s clear that the plotter isn’t hitting the coordinates very precisely. But given the somewhat compliant nature of the omni wheels, we’re surprised [lingib] got results as good as these, and we applaud the effort.
[lingib] reports the most expensive part of this $100 build was the omni wheels themselves. We suppose laser-cut MDF omni wheels could reduce the price, or even Mecanum wheels from bent metal and wood. We’re not sure either will help with the precision, though.














Omniwheels and the like are really cool but unfortunately that’s about it.
Care to uh.. elaborate?
Their comment makes a really good point but unfortunately that’s about it.
There are a few applications of mecanum wheels that are pretty keen, but they do require a relatively controlled environment to work well. Like the navy ships and warehouses they get used on as part of forklifts & container loaders.
Certainly not the be-all end-all of wheels, though.
Omniwheels aren’t really cool if you heat them up.
The author describes some of the shortcomings of omniwheels, the inexpensive drive system etc. and suggests some remedies. All of that aside, this is both a cool project and an exemplary writeup. The author [lingib] describes themselves as “55+ years in electronics, computers, and teaching … now retired.” I wish all Instructables were this well done.
What’s the bare minimum number of omniwheels for something like this? Could you get away with just three?
3 is doable. I would imagine that 4 were chosen to make programming easier and hopefully improve accuracy. At first I thought the bot was a 3 wheeled variant. I had to look again when I saw your question.
With only 2 wheels it would be kinda hard to get it done, but anything bigger than 2 is doable. The mathematic behind that is super simple, if and only if your wheels are arranged in a circle and have the same radius from the center.
A friend said it shouldn’t get much more complex if the wheel do not all have the same radius, but I think that was just easy for him. I haven’t looked it up though.
Three wheels are the optimum number. Set at 120 degrees apart and each powered by a motor, the level of power delivered to each wheel describes the directional vector in the horizontal. There’s no need for reorientation or the need to turn to change directions. It is the most efficient way to move from a to b. Three is actually easier to program, more precise and reliable – think that three wheels are always in contact with the ground, unlike 4 or more. For the most precise Omni wheels, check out Rotacaster Wheel.
Still waiting on the wheels, but I pretty much have the rest assembled. Having trouble with Blue Tooth through an Android. Any particular terminal program? Using the Arduino terminal I get a MENU to fire up, and seems active. Can’t get a similar response on any of my Android Apps., Apps that work fine with other Arduino Blue Tooth sketches. Anybody else have similar problems?
Do you think it would be possible to fit a CNC router to this? Would you need to add weight or could you just make it travel really slowly?