Some scrap wood, a few pieces of sheet metal, a quartet of old gear motors, and a few basic hand tools. That’s all it takes to build an omni-bot with Mecanum wheels, if you’ve got a little know-how too.
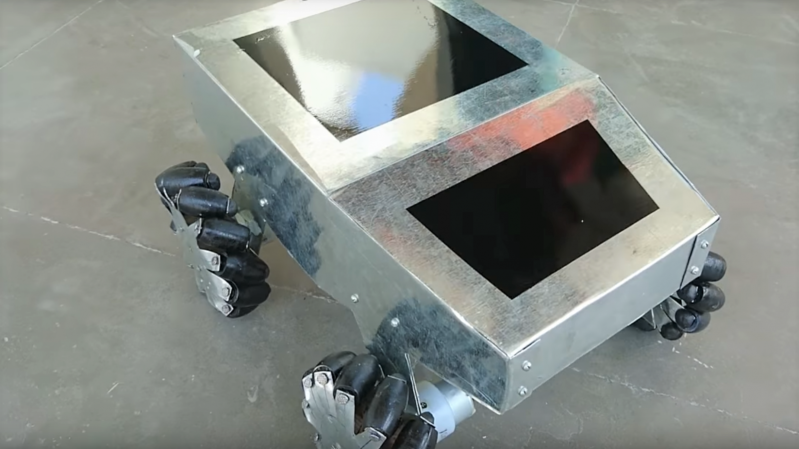
For the uninitiated, Mecanum wheels can rotate in any direction thanks to a series of tapered rollers around the circumference that are canted 45° relative to the main axle. [Navin Khambhala]’s approach to Mecanum wheel construction is decidedly low tech and very labor intensive, but results in working wheels and a pretty agile bot. The supports for the rollers are cut from sheet steel and bent manually to hold the wooden rollers, each cut with a hole saw and tapered to a barrel shape on a makeshift lathe. Each wheel is connected directly to a gear motor shaft, and everything is mounted to a sheet steel chassis. The controls are as rudimentary as the construction methods, but the video below shows what a Mecanum-wheeled bot can do.
There’s a lot of room here for improvement, but mainly in the manufacturing methods. The entire wheel could be 3D printed, for instance, or even laser cut from MDF with a few design changes. But [Navin] scores a win for making a working wheel and a working bot from almost nothing.
Thanks for the tips, [Karl Rosenqvist]!














I’m impressed with all of the stuff he has made, and to do that sheet-metal work without a single cut on his hands too! I’ve seen some dirty, ugly and banged up paws on DIY videos but this guy seems to have the dexterity of a surgeon.
Amazing result from low-tech tools (no 3D printers or laser cutters). Sure, one could optimize and polish many things, but right now the robot is doing what is was supposed to do.
This process could be scaled up much more easily than a printed wheel, and hell, knowing how things work from first principles only leads to better results.
I love how its falling apart ;) a true “Hack”, was the black only paint or was it some rubber coating?
Those omniwheels are easily sourced for low prices,in an earlier project i worked on we ended up buying rather than building our own.
Omniwheels, yes. Mecanum wheels not so much, those are still fairly expensive.
Obviously, Omni and Mecanum wheels are not the same.
All Mecanum wheels are omni-wheels but not all omni-wheels are Mecanum wheels. Omni-wheels were patented in early 1900s. Mecanum came in the 70s and was a brand name. The critical design element is that the rollers are set at 45degrees. 45 makes it a Mecanum specifically. >45< makes an ordinary omni-wheel.
Well, to be exact, the rollers on regular omni-wheels are set at 90° while those on mecanum wheels are at 45°
Makes me want to make weird angled rollers just to see how terrible they’d be. 33&1/3 FTW!
30 bucks a piece for a small wheel on aliexpress, pretty expensive for China
Mecanum wheels are great and we’ll done for making a simple chassis and drive.
But the nut and screw axles on the mecanum rollers made no sense to me.
A screw rotating in a larger nut.
So easy to just use a small shanked bolt screwed into the inset nuts and let it rotate on the shank in the metal holder rather than letting it rotate thread on thread.
Or simpler and more in keeping with the design.
Just a simple wood screw through the metal into the roller.
What are you talking about? He used smooth nails secured with some kind of putty. There are no threads!
I think Gordan was referring to the hex nuts.
I love seeing things that are *built* rather than *assembled* from a bunch of bought parts. Nicely done!
Very awesome hardware build! Now if you were someone local who I know I would be begging you to let me help you add electronics for wireless control!
Very cool but still nobody has made a mecanum tank treads! You need two tracks per side but I think it would just be neat to see.
If it worked, would solve the high friction skid problem tank tread has. Too often people try to make bots with tank tread and under powered motor/gearbox combos.
He painted those pretty wooden wheels! Add some brass tacks and extra gears and we’re looking at a perfect steampunk robot!
Does anyone know the solution to the accumulation of hair that always occurs with mecanum wheel axles.
Shave.
Don’t want to have a shaved pussy. Cats should keep their fur to look real and be fluffy. So different solution is necessary.
It’s looking like Home Depot (or large hardware store chain of choice) is the new Radio Shack for bot builders! there’s nothing he used that couldn’t be found in the right aisles or parts of products sold there.
Reasonably priced steel. You will never find that there.
Very late on this – but the steel he used looked like cheap galvanized sheet metal for ductwork; costs about $10.00 for a 24×36 inch piece.
When I first clicked on the video, I saw the timer. “7 minutes!” I thought, “I just want to see it move, not how he built it!”
Was I wrong!
That was a fun construction to watch. Very nice project.