Mowing the lawn is a chore that serves as an excellent character building excercise for a growing child. However, children are expensive and the maintenance requirements can be prohibitive. Many instead turn to robots to lend a hand, and [Rue Mohr] is no exception.
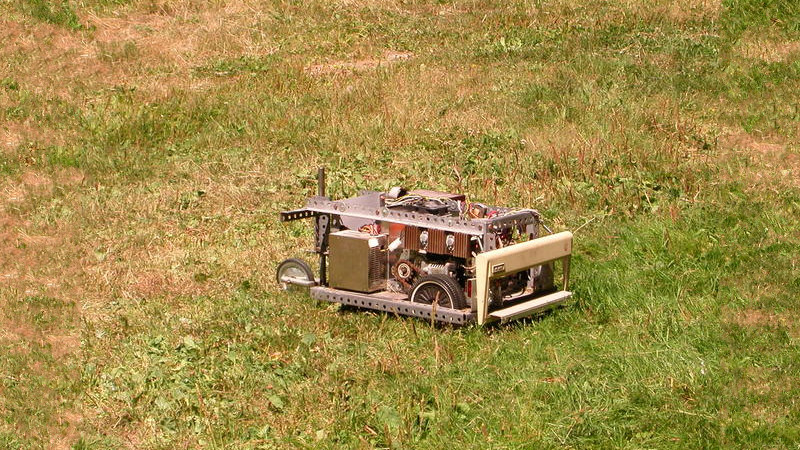
[Rue]’s creation goes by the name Mowerbot, and was first built way back in 1998. Steel angle and brushed DC motors are the order of the day, helping the ‘bot get around the garden and chop the grass down to size. Being of such a vintage, there’s no Raspberry Pi or Arduino running the show here. No, this rig runs on the venerable 386, chosen primarily as it can run off just 5 V. The original build ran off a 5 1/4″ floppy, though it was later upgraded to CF card storage instead.
It’s not the first robot mower we’ve seen, but is likely one of the longest serving. It’s still in use today, though [Rue] reports it’s due for some new batteries. Given it’s been chewing up the grass for over two decades now, that’s fairly impressive performance. We hope to see this 386-driven beast still cutting away long into the future.














Glorious, it deserves to be put on a pedestal should it ever retire.
no no, I need the lawn cut.
This *actually* made me laugh out loud. Good show!
Quick question for you Rue Mohr, are you using a 386 dev board or a standard PC board? If the former, which one?
Its actually a PC board, isa buses and all.
snopp the directory for more images
http://ruemohr.org/~ircjunk/robots/mowerbot/
Quick question for Rue Mohr, are you using a 386 dev board or a standard PC mainboard?
The writeup in the link is hilarious. Given that he makes pre-apologies for running over anyone’s pet, I wonder if his pen name isn’t a take-off on Mr. E. A. Poe’s “The Murders In The Rue Morgue”?
This mower has a distinct lack of upgrades. https://www.youtube.com/watch?v=W-689iqLDWY
heh, a good video indeed.
The mowerbot actually got to the point where its upgrade queue included everything. So, I started a new one with all the upgrades. Its not operational yet, a lack of motivation could stem from the fact the old one just keeps going….
http://ruemohr.org/~ircjunk/robots/mowerbot2/p1020374.jpg
That’s awesome that 2.0 is in the works. I started building one of my own recently, but it’s more simplistic. It’s simply a small tractor bot that pulls a handleless push reel mower behind it. Are you planning any upgrades to the AI? That’s where I’m stuck at now, figuring out the best way to make it do it’s chores on it’s own…
The software is written in BASIC, I’v tried to port it several times to C, but Guh, those old BASIC techniques sure are evil!
the sortware is *extremely* tuned, tiny differences to any of the timers make a huge difference in behaviour.
Any chance you would share your BASIC software? I would love to see the code. Thanks
Seems like there must be a joke about special grass-cutting opcodes of the 386 making short work of this application, or something along those lines
“Mowing the lawn is a chore that serves as an excellent character building excercise for a growing child. However, children are expensive and the maintenance requirements can be prohibitive.”
Not back in the day when they had ’em by the litter.
Yeah, these days society typically frowns upon feeding your children kitty chow.
Aww, crud. Is that why my son is always mad at me?
But apparently, society IS ok with “kiddy” chow… :-)
“When I was a boy..
My momma would send me down to the corner store with 1$ and I’d come back with 5 potatoes, 2 loaves of bread, 3 bottles of milk, a hunk of cheese, a box of tea, and 6 eggs. You can’t do that now…
Too many fuckin’ security cameras.” – some old guy
Now that I have a house, I already hate mowing the lawn. This quaint idea of suburban bliss, being one with nature as you mow the lawn, is just total bull. Its annoying and a waste of time.
Was just wondering today in seriousness how difficult it would be to build a lawn mower bot, with GPS mapping, nail spiked tires for lawn aeration and hillclimbing (my lawn is erratically undulating), and adjustable blade height control.
Has anyone done a really elaborate build like that yet?
My new one is slated for differential gps, running linux, I didn’t put an motor on the deck-height, but I have lots I could use….
Search no more: https://hackaday.com/?s=lawn+mower+rope
I’ve been wondering for a while if it would be possible to make something similar to the HTC Vive lighthouse that can work outside as a positioning aid for things like this. Lidar works in the daylight, I assume, why not this? You’d need a few lighthouses and a way to tell them apart though.
One would think the problem space easier unlike an autonomous car. After all the lawn topography stays about the same. It’s just the grass that changes.
today your link is:
http://ruemohr.org/~ircjunk/robots/abspos/code/problem.html
remember to snoop thru the directories.
Man, I love mowin the lawn. Time for quiet ponderance and obvious results at the end of the task. It is like meditation!
You can meditate on my lawn anytime you want ;-)
Everything about this is amazing, the project itself is already fascinating but his personal website is a treasure trove.
my appologies for the mess :)
I’m curious about the front bumper in the older pictures. That’s a keyboard frame right? Was there something about that which made it advantageous to use? Or was that just a case of using what was lying around? I thought it might be significant because as I remember it keyboards weren’t all that cheap in those days.
yes, its a keyboard frame, and it was just what was lying around :)
I have a box of old parts from the mower (I was thinking one day maybe I could rebuild the origional after everything had been upgraded) that its lieing in, waiting.
{ugh, probably was a blooming model M too >:/ }
I hope my guy has that kind of duration. https://youtu.be/eMcQdq4n67w . Robot mowers are awesome and watching then never get old.
Hey, what kind of position tracking are you using? Did you ever get it to go in straight lines? I’m building one myself and I’m not sure how Im going to solve the self guidance problem yet…
Using GPS RTK and ardupilot with a Pixhawk Cube. Going to work out the straighter lines this season.
Here are some videos and descriptions of what I did so far. https://www.youtube.com/playlist?list=PLTpy82kHjGKeXY-l_LT7C4HBfS8FpE3K2
Back in the early 90s, Electronics Now ran a several-month-long series on building your own robotic lawnmower, dubbed The Lawn Ranger. I stumbled across a few dusty copies in the back of my electronics classroom in high school in the late 90s. The original used a row of infrared LEDs and phototransistors across the front to detect the cut edge of the grass, and the mower would follow that cut edge around the lawn. This required you to either steer the mower (with an add-on box with controls that you could build) or to mow around the edge of the lawn with a traditional lawnmower. The mower used a row of rotating blades at the front to cut the grass, and I don’t think it had any provision for bagging the cuittings.
The whole thing was driven by a custom controller board which used a Z80 CPU and an EEPROM. Problem for me was the magazine didn’t publish the code that was required to be burned into the EEPROM, the BBS from where one could download the code was no longer up, and the company that had produced the original mower was either out of business, or I could not locate them in order to order the set of pre-burned EEPROMs.
Since at the time Arduinos were long off, and BASIC stamps were available but out of my budget, I was going to use a PCs parallel port through some optoisolators and other goodies in order to control the mower, but I had trouble getting stable 12V and 5V power at the required levels on my meager high school student budget, so I eventually resolved to control it with a Commodore 64 instead of a IBM PC, and I hadn’t figured out enough of C64 programming by graduation in order to build it.
Now thinking how easy it would be if I could send an Arduino Mega back to 1998!
The definition of vaporware!
Power supply: indeed!
The 5V supply for that mowerbot isn’t just *in* a PC power supply box, its *made* of a PC power supply.
– completely dissassemble *everything*
– rewire the TL494 as a buck regulator
– rewind the power core as a filter inductor
– by putting some of the parts back in the wrong place, and jumping between all the right spots, repurpose the PCB.
– if its output is not stable, add more capacitors!!!! (hahaha, oh, when things were simple!)
:-)