Robots of the entertainment industry are given life by character animation, where the goal is to emotionally connect with the audience to tell a story. In comparison, real-world robot movement design focus more on managing physical limitations like sensor accuracy and power management. Tools for robot control are thus more likely to resemble engineering control consoles and not artistic character animation tools. When the goal is to build expressive physical robots, we’ll need tools like ROBiTS project to bridge the two worlds.
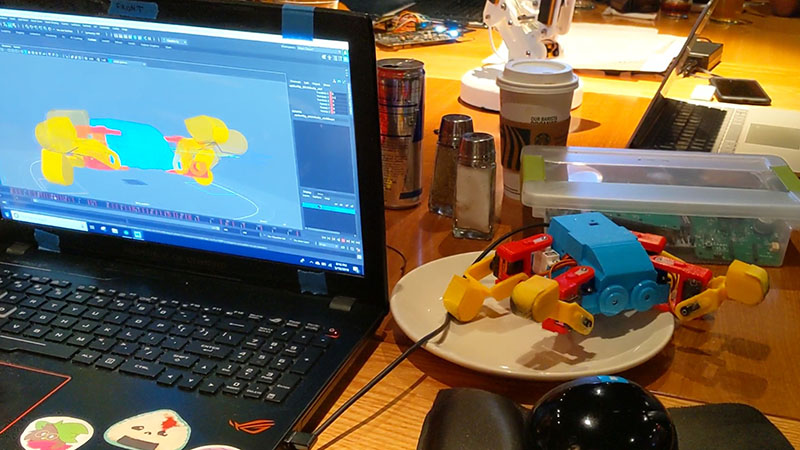
As an exhibitor at Maker Faire Bay Area 2019, this group showed off their first demo: a plugin to Autodesk Maya that translate joint movements into digital pulses controlling standard RC servos. Maya can import the same STL files fed to 3D printers, easily creating a digital representation of a robot. Animators skilled in Maya can then use all the tools they are familiar with, working in full context of a robot’s structure in the digital world. This will be a far more productive workflow for animation artists versus manipulating a long flat list of unintuitive slider controls or writing code by hand.
Of course, a virtual world offers some freedoms that are not available in the physical world. Real parts are not allowed to intersect, for one, and then there are other pesky physical limitations like momentum and center of gravity. Forgetting to account for them results in a robot that falls over! One of the follow-up projects on their to-do list is a bridge in the other direction: bringing physical world sensor like an IMU into digital representations in Maya.
We look forward to seeing more results on their YouTube channel. They join the ranks of other animated robots at Maker Faire and a promising addition to the toolbox for robot animation from Disney Research’s kinetic wires to Billy Whiskers who linked servos to Adobe Animate.
















Thank you for the shout out Hackaday! Extremely fun talking with you at Maker Faire!
If people would like to learn more, we have an instagram page at the_robits, or shoot us an email at research@therobits.com
Saw you guys at Maker Faire, loved the work, absolutely! Hope we can collab!
This is pretty cool. People have done this with Blender as well, thanks to its extensibility. I found this while researching ways to control a robotic arm remotely.
https://hackaday.io/project/9851-controlling-a-robot-arm-with-blender
haven’t seen that, but I’ll have to check it out!
Using an animation tool approach to control robots is what I have been working on since longer as well. I am making a custom solution, though.
Exciting to see mature solutions in this direction :)
Thank you! Our animators are trained in maya so this is what comes naturally to them.