Animatronic displays aren’t just for Halloween, and hackers today have incredible access to effective, affordable parts with which to make spectacles of light, sound, and movement. But the hardware is only half the battle. Getting everything synchronized properly can be a daunting task, so get a head start on your next holiday display with the Hauntimator by [1031-Systems].
After all, synchronizing movements, sound, and light by trial and error can get tiresome even in small setups. Anyone who makes such a display — and contemplates doing it twice — tends to quickly look into making things modular.
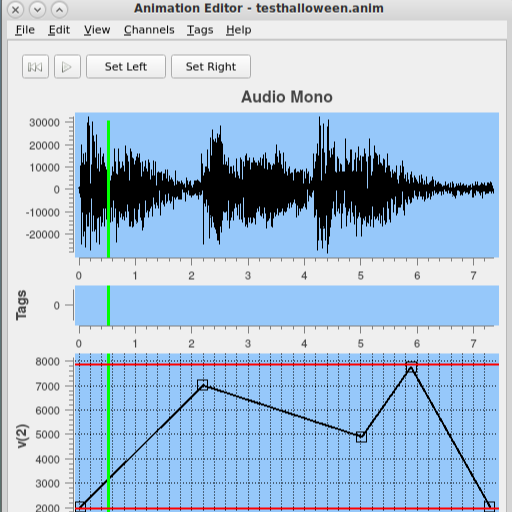
At its heart, Hauntimator works with a Raspberry Pi Pico-based controller board. The GUI makes it easy to create control channels for different hardware (for example, doing things like moving servos) and synchronize them to audio. Once an animation is validated, it gets uploaded to the control board where it runs itself. It’s open-source and designed to make plugins easy, so give it a look. There’s a video channel with some demonstrations of the tools that should fill in any blanks.
Intrigued by animatronics, but not sure where to begin? Get inspired by checking out this DIY set of servo-driven eyes, and see for yourself the benefits of smooth motor control for generating lifelike motion.