
The sound a set of machined robot legs tapping on concrete make is remarkable. If for nothing more, the video after the break is worth watching just for this. It’s what caught my attention when I first wandered by the Mech Warfare area at Maker Faire, as one of the competitors had their bot out wandering around as a demo during the setup day.


This is truly a hacker’s robotics competition. There are constraints, but there’s also a lot of room for freedom. Meet a dozen or so requirements and you be as creative as you want with the rest. My favorite part is that this is not a destructive event like many the battle-based robot TV shows that tend to turn my stomach. Instead, these robots each carry an electric AirSoft gun and seek to hit any of four target panels on their competitor’s robot.
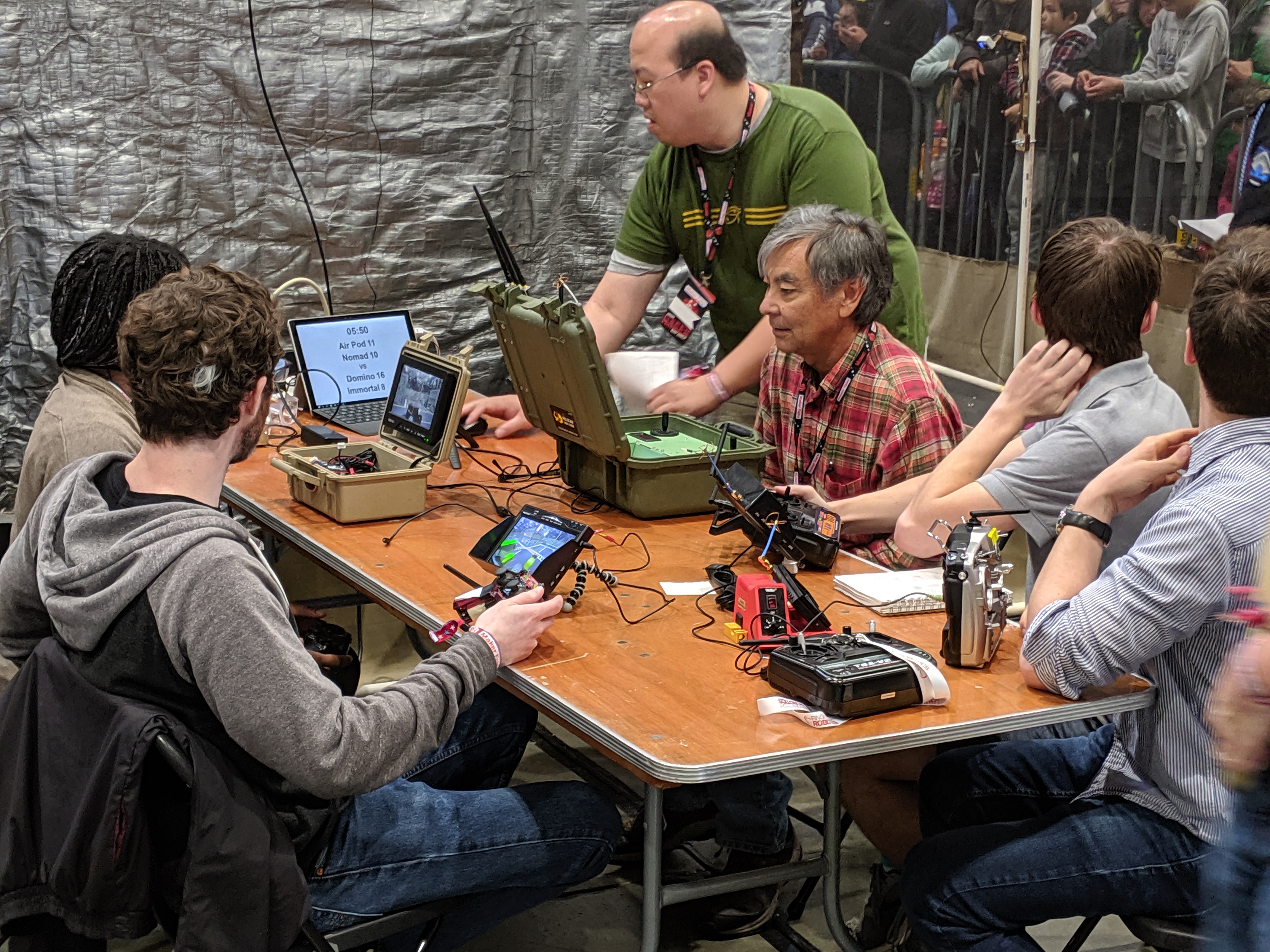
These make me think of the Tachikoma, a huge four-legged tank from Ghost in the Shell. It’s not just the number of legs — limited to four or less — that bear that similarity. For each round, the robots are placed in a miniature model of a city, and operators use FPV hardware I’m used to seeing in flying drones. This setup gives them the effect of driving building-sized mechs, and the audience gets to follow along with monitors mounted next to the scoreboard for the competition.





I haven’t seen one of these events in person before, but this group has been competing for five years. And a little searching turns up coverage of similar events going back to 2011 and beyond. We’ve even seen build details for competition robots over on Hackaday.io that really show off the engineering that goes into these robots.
This is just a short clip that provides a glimpse of the fun. But you can get a much better feel for the sport by watching a full match. At multiple points around the arena, action cameras are running to capture each round of competition. Maker Faire footage has not yet been posted, but you can see dozens of battles from previous years on the RTEAM Robotics Club webpage.














this is way better than the senseless destruction of “robot wars”!!
I’d like to see an autonomous robot competition
Autonomous robot competitions exists, but are incredibly boring to watch. The humanoid robot combat, for example, turns mostly into a challenge of finding your opponent, and the robo-soccer is all about robots being outsmarted by a ball.
(competitor here) Autonomous is absolutely allowed. We had auto tracking this and previous years on at least one bot. No one has done autonomous nav, yet, though.
Full autonomy is completely allowed, but consider the complexity of these projects… in particular, the custom airsoft hardware is very work intensive to develop and make reliable. Competitively, rather than working towards autonomy, my time was much better spent on doing a new iteration of a mech that was lighter weight, better coded and faster walking, and making it reliable. My brand new bot was still at the bottom in ways, due to more refinement needed (especially my control scheme).
My hope is to work towards some partial autonomous nav for my own over the next year or so, but I’m very familiar with the difficulties of such from my job… (Also, I still need to get a writeup done of my most recent bot)
what are the rules concerning wheels/treads? could you go full tachikoma and put wheels in each leg in addition to standard walking?
Yup, this has been done! I believe the mech was limited to walking instead of rolling during matches, however. http://forums.trossenrobotics.com/showthread.php?4341-Xachikoma-a-4-DOF-quad (Vid on page 9 of that thread)
I want to see this combined with my biped… https://ssl.linklings.net/conferences/acra/acra2018_proceedings/views/includes/files/pap121s1-file1.pdf
Check out this biped… https://www.youtube.com/watch?v=fcTJ9yBaUqE
By far the biggest challenges with bipeds are that you’re going to be adding ~1.5 lbs for gun, ammo, scoring system. And you’ll be slow, out-maneuverable, and tippable by the quads :/
I’ve never build any robots, but I’m sure that the solution to increasing biped speed and maneuverability is roller skates.
The whole point of my research project is to build a system that is fast, maneuverable and highly stable. Not as stable as a quad, but cheaper and faster – and certainly better than a “shuffle-walker” biped.
I like the non-destructiveness of the event very much – it was one of the most irksome factors in the usual RoboWars for me. The other weird thing was that the ‘robots’ are mostly souped-up RC-cars and have little to no automation/autonomousness angles. With walking robots there needs to be healthy dose of that, which is great, but i just now perused the rules, and it says nothing about auto-aiming and other sensors beyond cameras (it would be great if both were allowed, but the intro to the rules gives a blanket ban on all ‘gimmicks’, so i am not quite sure whether those are in or out) – anybody in the know?
Out of curiosity, I also read the rules; there seemed to be talk of being allowed to affix fiducials (visual recognition targets) to opponent’s target panels for autonomous or “visual tracking” so I assume auto-aiming must be allowed as part of that (see section VII “MWScore Scoring System”, rule #6).
Given how explicit they are about some many aspects such as only two cameras and no cam-based walking action, I can’t see how other sensors wouldn’t be allowed – I assume that more sensors would then require more power and so more ultimate weight and could therefore be a disadvantage.
I was told that auto-aiming was allowed. When you see the pink Post-It notes on the target pads, that’s for a bot that aims based on color.
Also, they are limited to two cameras but one of the builders mentioned seeing a top camera mounted on a motor so that it spins and then software builds a 360 degree image out of each revolution. Unfortunately I couldn’t find the team who did that to talk to them (may not have been at the Faire).
Can confirm, autonomous is allowed. But first you have to build a working mech, which is a high bar to begin with… and then you probably will have a dozen ideas for refinements… and a couple years later, you’re ready to build a new robot altogether. :)
Additional sensors are additional weight though. But on the other hand, sensor size and single-board-computer size have both gone down a lot in the past 8 years.
The camera restriction is (intended to be) specific to cameras for which you transmit the feed back to the pilot. We generally have lots of interference issues at large events like Maker Faire and (worse) RoboGames, and this is one way we minimize that.
Is there still a limit if the video feed switches before being transmitted?
You know they are serious when they build their controllers inside Pelican boxes!
Giant mech through a city is probably a meme. I remember soon after F.E.A.R and some other games showing a trailer of two mechs doing exactly that. People like destruction and mechs do that is spades.
Why Airsoft instead of lasers and sensors? Also why not “degrade” robot performance with each hit (randomly ignore commands as per hit count, 75% commands get though after 1 hit, 25% after 3 for example.)
The airsoft vs lasers question is a common one. The largest reason is this is meant to be a spectator sport. Not every match delivers fully, but it’s quite fun seeing the robots moving around attempting to surprise each other.
One of the things we did new this year (probably prototyped a bunch last year outside competitions), to encourage movement, etc., was to add an incremental delay between being able to score hits on robots. For a given one of the four score panels, it tracks how many hits it has taken. After the first hit, there’s a 1 second delay before another hit cna be scored. This then becomes 2s, 3s, up to 10s. But each score panel is a separate incremental delay, so this works pretty well to encourage (1) moving around so you surprise and hit all sides of the other robot (2) discourages two robots just sitting in place scoring hits on each other every 10 seconds.
I remember when that first came on decades ago…. It was neat and all, but I thought, “This is just little robots pushing each other around with the occasional spark or piece of metal flying through the air.”
I imagined a TRUE “robot war”… an “anything goes” competition in the Nevada desert where contestants were hundreds of yards away, if not miles. Robots would not be limited to wedges, circular saws, and flails – but rather high-energy kinetics, explosives, rockets, and firearms. A real “battle”.
Later, another show -did- nearly come close. It was located in a desert and featured larger machines and weapons such as flamethrowers…. but it still fell short of my dream.
Someone should put this GITS robot into the competition: http://gits-tank.com/