Building a future where robots work alongside humans relies heavily on soft robotics. Typically this means there will be an air compressor or a hydraulic system nearby, taking up precious space. But it doesn’t have to.
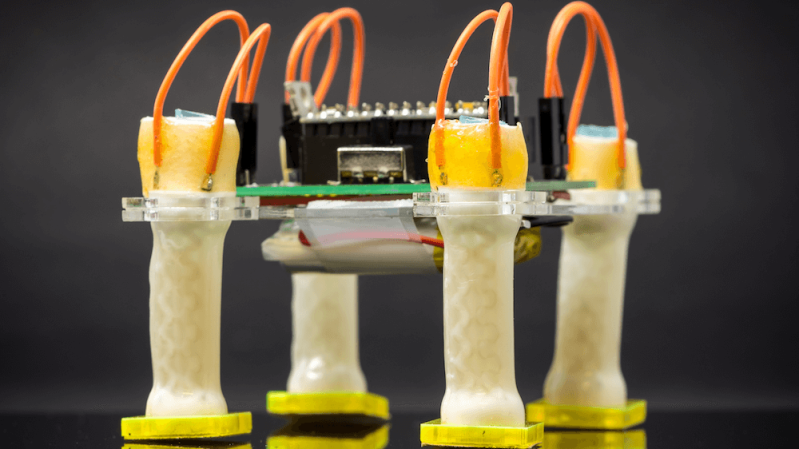
Engineers at the UC-San Diego Jacobs School have created a soft robotics system that uses electricity to control flexible actuators, much like our brains move our muscles. It works like this: sheets of heat-sensitive liquid crystal elastomer are sandwiched between two layers of standard elastomer. These layers are rolled into cylinders that can twist and bend in different directions depending on which of its six element(s) get electricity. Light up all six, and the tube contracts, forming the foundation for a good gripper. The team also built a tiny walker, pictured above.
The project is still in its infancy, so the actuators are slow to bend and even slower to return to their original shape, but it’s still a great start. Imagine all the soft robotic projects that can get off the ground without being shackled by the bulk and weight of an air compressor or fluid handling system. Watch it do various sped-up things after the break, like claw-machine gripping a bottle of chocolate rocks.
Speaking of delicious candy, edible soft robotics is totally a thing.
Via Arduino blog














So, basically, they’ve made a slug? Gotta creep before you crawl…
Or a real life version of the Myomer material from Batteltech.
Slower than a slug.
It just needs a dose of nitrous, did wonders for Turbo! ;)
“sheets of heat-sensitive liquid crystal elastomer”
I’m always weary of heat based solutions because it means it will be slow, high power and only works in cool environments.
Meatbag? That’s Mr. Meatbag to you, silly robot.