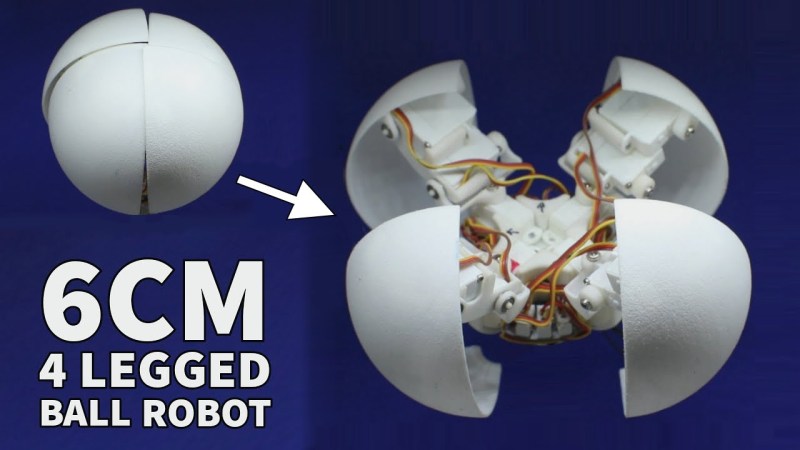
When the Skynet baseball bot swarms attack, we’ll be throwing [Carl Bugeja] some dirty looks for getting them started. He’s been working on 4B, a little quadruped robot that can transform itself into a sphere almost perfectly.
Before [Carl] was distracted by the wonders of PCB actuators more than a year ago, he started working on this little guy. He finally found some time to get it moving on its own, and the preliminary results look promising to say the least. Inside the 6 cm sphere is a total of 12 servos, 3 for each leg. All of the mechanical parts were 3D printed in nylon on an SLS machine, and the custom PCB has a BLE microcontroller module, an IMU and IR proximity sensors onboard. Everything is open source with all the files available on the Hackaday.io project page.
The microcontroller runs a full inverse kinematic model, so only the desired tip and base coordinate for each leg is input and the servo angles are automatically calculated. Ultimately [Carl] aims to have the robot both walking and rolling controllably. So far he’s achieved some degree of success in both, but it still needs some work (see the videos below. We’re eager to see what the future holds for this delightfully creepy bot.
Walking robots are always an interesting challenge. For more of our future overlords, check out this adorable little cat and this truly terrifying strandbeest.














Hi, I heard about this kind of robot years ago : http://zentasrobots.com/robot-projects/morphex-mkiii/
Nice.
MorphHex is one of the inspiration behind this project :)
Instantly thought of that one too xD
Wonder where that guy went though, he didnt post updates in years :(
Remember MorphHex?
https://hackaday.com/2012/04/02/sphere-morphing-hexabot-now-rolls-around/
MorphHex is one of the inspiration behind this project :)
I was kinda wanting it to roll at speed and then spring to it’s feet like a StarWars destroyer droid (Droideka)
getting there https://www.instagram.com/p/B6ROCM8HPSP/
He might be planning to do that once he solves the robot’s tendency to roll off the table. Just needs some sort of motion routine to get it oriented correctly once it stops rolling.
Can this be used for disaster relief for example in car crash or earthquake?
I made a ball roll one time…
Well, it’s good to see that *someone* is having a ball… :D
I’ll be here till Thursday — try the veal!
Sentry turrets from Portal :)