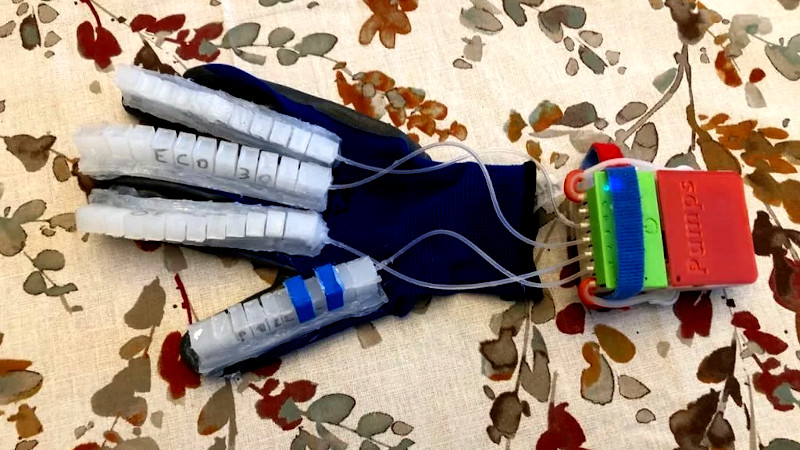
Many projects have aimed to replicate the function of the human hand, creating robotic structures that mimic real anatomy. Fewer have attempted to work with human hands directly. SoftGlove is a project by [france.bonde] that uses pneumatics to do just that.
The glove works by using a silicone pneumatic actuator for each digit on the human hand, attached to a glove. These are created with 3D printed molds, into which EcoFlex silicone is poured. A FlowIO device is used to run the pneumatics, which combines a microcontroller with penumatic hardware to pump air in and out of the actuators.
The goal of the project is to use a companion unit, in which a glove with flex sensors is used to make the SoftGlove mimic its movements. This would allow SoftGlove to move the fingers of a person with damaged muscle control, potentially aiding the muscles and nerves to recover when used in a therapeutic setting.
It’s exciting to see typical maker technologies used in a context to create better outcomes for patients, and we’re excited to see where this project leads next. It also has potential applications for robotic actuators, too. Programmable Air is another exciting project working in this space, too. And of course, if you’ve got a hot pneumatics project you’re cooking up in the garage, be sure to let us know!













This is a great idea! A very handy tool for physiotherapy too.
OMG I love this.. I have a form of stiff person syndrome and my hand just kill me with pain. I have been looking at things on HaD that could be used to help others out too. I had used solid strips of carbon fiber to go from my finger tips to the top of my wrist then held in place with black tape to a glove. This would release some of my muscle pain in my hands. But who wants to wear gloves all the time. Me if it works thats who. Dont get me wrong it helped but it didn’t have any movement.
I have been looking at devices like this to help with my hand dexterity after spinal cord injury for some reason there doesn’t seem to be many out there