Multirotor aircraft enjoy many intrinsic advantages, but as machines that fight gravity with brute force, energy efficiency is not considered among them. In the interest of stretching range, several air-ground hybrid designs have been explored. Flying cars, basically, to run on the ground when it isn’t strictly necessary to be airborne. But they all share the same challenge: components that make a car work well on the ground are range-sapping dead weight while in the air. [Youming Qin et al.] explored cutting that dead weight as much as possible and came up with Hybrid Aerial-Ground Locomotion with a Single Passive Wheel.
As the paper’s title made clear, they went full minimalist with this design. Gone are the driveshaft, brakes, steering, even other wheels. All that remained is a single unpowered wheel bolted to the bottom of their dual-rotor flying machine. Minimizing the impact on flight characteristics is great, but how would that work on the ground? As a tradeoff, these rotors have to keep spinning even while in “ground mode”. They are responsible for keeping the machine upright, and they also have to handle tasks like steering. These and other control algorithm problems had to be sorted out before evaluating whether such a compromised ground vehicle is worth the trouble.
Happily, the result is a resounding “yes”. Even though the rotors have to continue running to do different jobs while on the ground, that was still far less effort than hovering in the air. Power consumption measurements indicate savings of up to 77%, and there are a lot of potential venues for tuning still awaiting future exploration. Among them is to better understand interaction with ground effect, which is something we’ve seen enable novel designs. This isn’t exactly the flying car we were promised, but its development will still be interesting to watch among all the other neat ideas under development to keep multirotors in the air longer.
[IROS 2020 Presentation video (duration 10:49) requires no-cost registration, available until at least Nov. 25th 2020. Forty-two second summary embedded below]














That’s a really great idea. It clearly needs refinement, as I doubt that 77% increase in efficiency includes equal travel distance at that speed. Increased run time means little if it doesn’t help the drone travel to useful places with varying terrain. Maybe a bigger and softer wheel with a bearing?
What a royal joke of an idea!!! Make it 3 or 4 wheels and when you want to fly then spin up the rotors. To have this contraption the way it is is just a plain waste of power.
More wheels means more dead weight and more drag while flying. This was explained in the first paragraph.
perhaps they failed at the notion of super lightweight carbon fibre … discs as wheels?! I mean just look at that idiot device, they cant switch off the blades ever or it will fall over… sorry that’s a complete fail. Three sub 10g wheels would add so little dead weight in flight but would add so much out of flight consider the advantages of complete no power idle on ground… no not fall over it can take off any time, light use of propellers in ground motion as no balancing is needed so quite a bit of power saved there too.
Please link to your writeup detailing your superior vehicle and your test data proving your assertions. We’d all love to see a better way, that’s how research works.
So in order for me to present my idea, any idea, feedback or otherwise, I have to launch a research project? Bravo to zero feedback and pretty much zero progress from here onwards. Collaboration? Pfft. Well done.
One, surely some wire “skis” would make this stable even with the rotors off. Lightweight. No moving parts. Has a preferred axis of travel, but so does the fixed wheel. Arguably some stiff wire loops would allow low-friction travel across grass, and add much less mass than comparably large wheels.
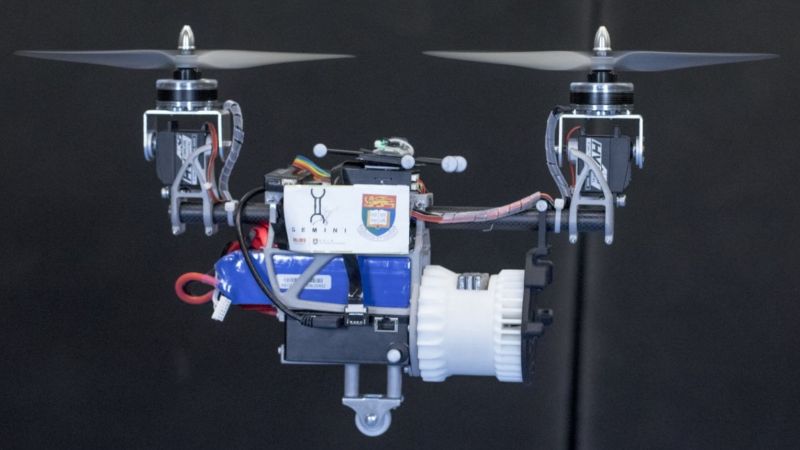
Two, the image looked like one rotor could roll. I initially thought that white cylinder was the “wheel.” You shouldn’t need much play in that axis to have a tremendous effect on how the drone moves, but a human pilot would need time to wrap their brain around it.
The small white cylinder at the bottom is the rolling wheel. The paper explained that the much larger white cylinder is a piece of 3D-printed plastic standing in for a LIDAR unit typically installed on this aircraft. It makes sense to have a cheap placeholder on board while iterating through their control algorithms, so the inevitable crashes won’t break expensive instruments.
There was a cheap Parrot drone that had two large wheels on the sides, both unpowered. It did have some ability to roll around on the floor using thrust to tilt the whole drone, but it’s definitely far from optimal. One thing it’s good for is dusting hard floors and other large, flat surfaces, especially with the help of a fan to blow the dust out the window.
Leafblower x Roomba!
>hovering in the air. Power consumption measurements indicate savings of up to 77%
false dichotomy. Why hover at all if you need to drag crap on the ground?
I can provide 99% energy reduction – remove propellers, slap 3 more wheels and just drive.
A flying car, but without the flying. You have re-invented the car.
Exactly, and these guys invented what? A one-wheeled car that is less efficient and more noisy?
A drone that can travel on flat surfaces when they are available as a means to save power. I don’t know where exactly this design would come in useful, or where between the “car with a drone attached” and “drone with a skid wheel to allow movement without enough thrust to support the whole robot” that use case would find optimal, but I still think it is an interesting idea. I tend to believe that lightweight materials could allow for a more efficient ground traversal mode without sacrificing flight efficiency too much, but I don’t have the experience to say. Of course, this all depends on the balance between flight an ground movement.
Go back to the Flying Horse…
https://www.youtube.com/watch?v=kyH9Z6fKjLk
To see the potential, don’t think of it as a flying car anymore. It’s a ground based drone that can hop over barriers. A “car” can’t do that. With the first barrier a car is losing time and fuel. The unicycle drone hops over the barrier and continues on the most efficient path to its destination.
and the number of wheels does not remove that functionality. in fact it aids it. Two or three wheels albeit from super light materials.. would add substantial stability removing much of the props fighting to keep that thing from flopping onto it’s side. That would have to be a substantial power saving yet again.
I have a better idea. Four propellers, but with a built in shroud. Connect each prop motor with a servo, just like this device. When it’s required to travel by ground, turn the servos 90 degrees (just like in Back to the Future!) and roll the props along the shrouds. You could transition from air to ground by just landing while in air mode and the servos roll the motors down and push the props onto their shrouds. You could wrap a little rubber strip around each shroud to give it a little better traction. You might gain a little efficiency with the shrouds since you aren’t throwing some of the air away too!