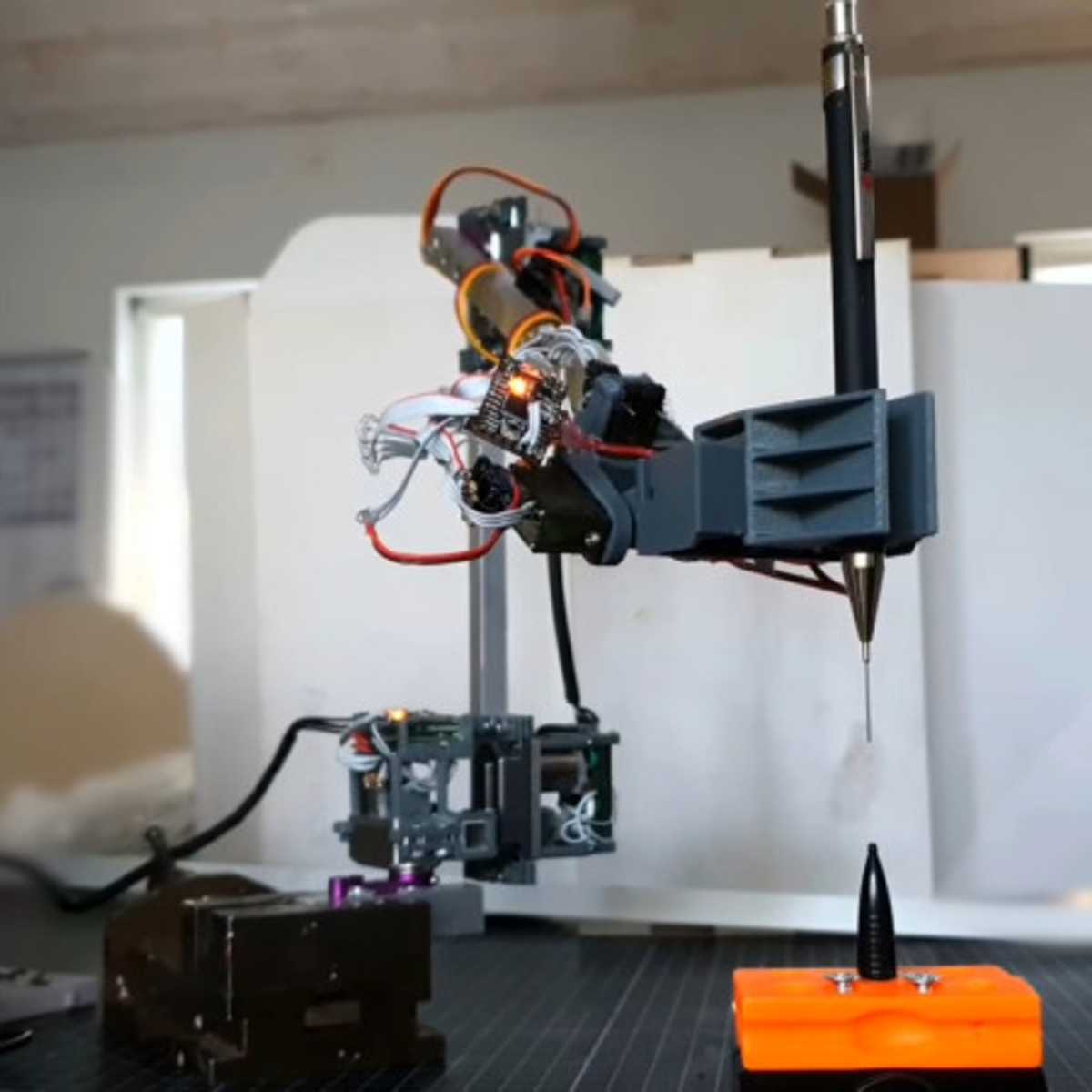
I was absolutely struck by a hack this week — [Adam Bäckström]’s amazing robot arm built with modified hobby servos. Basically, he’s taken apart and re-built some affordable off-the-shelf servo motors, and like the 6-Million-Dollar Man, he’s rebuilt them better, stronger, faster. OK, and smoother. We have the technology.
 The results are undeniably fantastic, and enable the experienced hacker to get champagne robot motion control on a grape-juice budget by employing some heavy control theory, and redundant sensors to overcome geartrain backlash, which is the devil of cheap servos. But this didn’t come out of nowhere. In his writeup, [Adam] starts off with “You could say this project started when I ordered six endless servos in middle school, more than 15 years ago.” And it shows.
The results are undeniably fantastic, and enable the experienced hacker to get champagne robot motion control on a grape-juice budget by employing some heavy control theory, and redundant sensors to overcome geartrain backlash, which is the devil of cheap servos. But this didn’t come out of nowhere. In his writeup, [Adam] starts off with “You could say this project started when I ordered six endless servos in middle school, more than 15 years ago.” And it shows.
Go check out this video of his first version of the modified servos, from a six-axis arm he built in 2009(!). He’s built in analog position sensors in the motors, which lets him control the speed and makes it work better than any other hobby servo arm you’ve ever seen, but there’s still visible backlash in the gears. A mere twelve years later, he’s got magnetic encoders on the output and a fast inner loop compensates for the backlash. The result is that the current arm moves faster and smoother, while retaining accuracy.
Twelve years. I assume that [Adam] has had some other projects on his plate as well, but that’s a long term project by any account. I’m stoked to see his work, not the least because it should help a lot of others who are ready to step up their desktop servo-arm projects. But the real take-home lesson here is that if you’ve got a tough problem that you’re hacking on, you don’t have to get it done this weekend. You don’t have to get it done next weekend either. Keep hammering on it as long as you need, but keep on hammering. When you get it done, the results will be all the better for the long, slow, brewing time. What’s the longest project that you’ve ever worked on?














7 years rebuilding a restomod motorcycle. I may submit to the tip line when I feel like making a build log
20 years working on an 8mm-to-video converter. Endless rebuilds and rewrites, loads of fun.
Hah, this reminds me of an answer I gave to someone just starting their college career when asked “oh man, that modified bluetooth clock is awesome! How do I do that?”
Boiled down to “I can show you how to do *just* that. To do random things like that the guy who built it’s been a hobbyist since he was your age, acquired an EE degree along the way, and still likes reverse engineering circuits recreationally. So.. learn everything you can?”
Continuing to learn and hone the skills you build is one of the best investments you can make.
Sorta reminds me of a musician I know. She’ll occasionally get people asking how to perform like her. Her answer is usually, “Start practicing when you were six.” Snarky, I know, but sometimes people act like the performance isn’t the result of decades of work.
A person approached a violinist after a concert and said, “I’d give my life to play like you do!” The violinist replied, “I did”
I was playing with one of the best rock guitarists I’d ever met at the time, and after just jamming (he was an amazing rock soloist) I said “Man, I wish I played half as good as you do!” “You do!” he said.
ZING.
I would have thought that’s a compliment. Being half as good as one of the best is often very good indeed.
I bought and partially assembled an audio amplifier 39 years ago, and finished it last week. Does that count?
Yes, absolutely! I hope it sounds as good as you expected.
Yeah that counts I would say!
40 years of self-improvement and counting.. including breaking the ‘perfectionist’ streak that has plagued me for so long.
I am constantly amazed at the number of people that I have encountered in these 40 years who, at various stages in their careers, have simply given up and will not budge.
“Perfect is the enemy of Done”.
“But the real take-home lesson here is that if you’ve got a tough problem that you’re hacking on, you don’t have to get it done this weekend. You don’t have to get it done next weekend either. ”
Thank you! I will use that as justification for my procrastination!
B^)
And now you’re putting off your putting off.
B^)
I have a sign in my workshop that says “I always wanted to be a procrastinator, I just never got around to it.”
B^)
When i was a kid my mother gave my father a wooden disk labeled “TUIT”. Told him that now he had no excuse to put things off – because he now had “a round tuit”. It hung proudly on the wall in the workshop.
Burn it! Save yourself!! That is really good fun, but a “round tuit” is far too dangerous to be left alive…
I am semi-pro in the Crastinator League.
I started a project to replace the interface board in a box for two 3.5″ SATA drives and have yet to finish it after getting close to two years. The original only allowed for RAID 1 mirroring with drives of 2TB max and it was USB 2. The replacement board I got is one that can mount in place of a CEN-50 SCSI connector. I modeled a new backplate to be 3D printed but have yet to get around to printing.
Worse tale with a Venus DSR3 Pro. Its original electronics allowed for different RAID arrangements but they’re dead. I’ve bought parts to keep the drives easily removable but haven’t even begun the 3D design work for the new back end of the housing.
Then there’s the refit to the CNC stuff on a circa 1990 ACRA knee mill that has a huge 10×40 inch table, formerly owned by AC-Delco. And the CNC makeover of a small JET metal lathe.
Just four of the many projects I have in various stages of being stalled.
I’ve been researching the best way to build a decentralized notetaking solution for about five years and only just now have any working code.
I also put about 7 years into my custom automation framework which now powers a few installations.
Wow, I’ve been working on a notetaking + project tracking system for the last several years, too! I just got some code down, so I’ve ended up with an org-mode markdown style notetaking system with some smarts on top (to run timer, compile todo-lists, etc) and use git to track all changes. I tried org-mode in Emacs, but it didn’t quite do everything and I needed it to work with my phone.
Would you mind sharing your concept? I’d love to hear part of your journey
Motivation is attenuated by patience, key technological barriers, and fiscal competition. For example, if individuals or groups are coincidentally interested in pursuing the same design rationale, than I consider the work is not unique enough and shelve my project… I do this to abandon the trap of irrationally competing with or replicating institutional and corporate programs. This often means abandoning some interesting viable builds, and interleaving several dozen concurrent active projects. From time-to-time, reactivating projects makes sense if (and only if) other teams couldn’t complete a technology, contaminate the field through patents, or publish papers on a specific implementation…
Note there are lots of smart competitive people around, but few creative individuals interested in new obscure problems with ambiguous answers. People usually choose to solve hard problems for personal reasons, and like minded people tend to see the value in the workmanship.
“This is why we can’t have nice things”… but some quiet individuals can and do… and donate them when they get bored. ;-)
Google Ikigai if you find life is unsatisfying.
;-)
it took me way too long to realise the image was the guys beard.
way too long to realise
His clever gripper mechanism:
https://www.youtube.com/watch?v=02Q1tomdRlQ
It may be interesting to attempt to understand from whence such a
mindset comes. Is it within us?.alWere.we “trained” that way by others.or circumstance. I lacked for siblings, but gained focus. Grandad sent me a broken pocket watch when I was 5 or so. After each annual or semi-annual dis & reassmebly it went into a (then metal) Band-Aid can. After about 4 or 5 years, it worked. About then I spent a whopping 3.98 on ARRL’s Handbook… and studied it over the years. It became the basis for my work. Yes, I was sans siblings, in the country and allowed limited TV. Is that enough? For anyone? For half of us perhaps? Hmmm… A martied couple whonwere teachers and blacklisted as they protested the ‘Nam “conflict,” force-moved to an affordable place, due to it being so rural no TV reached. In 2 years, 3 of the 4 children were geniuses. A quote was, “I’m bored mommy.” “Well, you can read a book or milk the goats.”
I don’t know what’s more concerning about the article picture: the mans shadow looks like bender, or the beard looks like soft serve ice-cream.