If you’ve been following the world of mobile phone technology of late, you may be aware that Apple’s latest IPhones and AirTag locator tags bring something new to that platform. Ultra wideband radios are the new hotness when it comes to cellphones, so just what are they and what’s in it for those of us who experiment with these things?

Ultra wideband in this context refers to radio signals with a very high bandwidth of over 500 MHz, and a very low overall power density spread over that spectrum. Transmissions are encoded not by modulation of discrete-frequency carriers as they would be in a conventional radio system, but by the emission of wideband pulses of RF energy across that bandwidth. It can exist across the same unlicensed spectrum as narrower bandwidth channelised services, and that huge bandwidth gives it an extremely high short-range data transfer bandwidth capability. The chipsets used by consumer devices use a range of UWB channels between about 3.5 and 6.5 GHz, which in radio terms is an immense quantity of spectrum.
The real trick up the sleeve for UWB comes not in its data transfer capabilities but in location services, because it allows the synthesis of extremely short RF pulses on the order of a fraction of a nanosecond by combining frequencies across that wide bandwidth. These pulses can be used for extremely accurate time-of-flight measurements between transmitter and receiver, allowing for the distance between them to be determined to an accuracy of a few centimeters. In a system such as Apple AirTags where a tag is likely to have visibility to more than one UWB-equipped Apple product, it can then be used for triangulation with several sources, and thus for accurate 2D and 3D positioning.
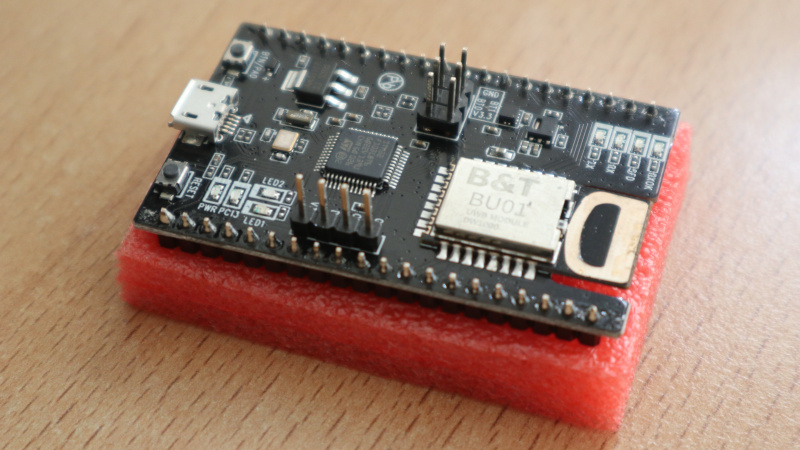
Happily this technology is not just for mobile phone manufacturers, and since commercially available UWB chips have now been on the market for quite a few years, there are now development boards that can be had for affordable prices. I was able to look at a board a friend of mine picked up on AliExpress for somewhere just over $20, which probably represents the current state of cheap UWB modules. It’s an AI-Thinker NodeMCU-BU01 board, and it has on board an STM32F103 microcontroller and a B&T BU01 UWB module which contains a Qorvo DW1000 UWB transceiver IC and has a very distinctive UWB antenna on-board. The DW1000 is pitched as an indoor positioning chip rather than a data transfer device, though with a 6.8 Mb/s data rate it’s not exactly a tortoise in that field. Sadly I’m not in a position to have a play with it myself, but he’s bought it with the intention of experimenting with his own AirTag-style locator tags.
It looks as though UWB devices are likely to be on the cusp of widespread availability, and if a hacked AirTag isn’t your choice for experimentation there are other perhaps more accessible devices which are only likely to become cheaper and more numerous. It may be about to gain an association with privacy-invading mesh networks from Big Tech companies, but behind that there have to be a lot of interesting possibilities for this type of location ability in our field of interest. Watch out for new boards, and start thinking of things you’d like to do with it!














I could see this applied to social distancing.
https://www.tdk.com/en/featured_stories/entry_018.html
Already deployed by a few companies.
Known as the “annoy-o-tron” where I work
Is it covidian devotional article?
Don’t need it with my buddy….. No one wants to be around him…. He is no longer an asshole…. He is a Professional Social Distancer…. 😄
It’s trilateration (or multilateration when applicable) that can be used for establishing position based on distance measurements. Triangulation requires measurement of angles.
You must be fun at parties. :-D
Let’s fix that empty beer glass in your hand.
I avoid reading Hackaday at parties.
You’re missing out of most of the fun (at some parties).
B^)
Except that there is no way of knowing the angles from an omnidirectional antenna. Trilateration is the correct term!
Nope, I am afraid. This definition mixes two meanings. It starts by describing a process of dividing an area into a network of triangles and in the end tries (and fails) to refer to the method of determining a position of a point by measuring two angles at the ends of a known baseline. In the context of AirTags the first meaning makes very little sense, and second meaing makes only slightly more sense (I doubt radios are equipped with antennae capable of measuring angles of incidence). Moreover the brief description of the technique resembles GPS (and other GNSSs) which use pseudorange multilateration i.e. measurement of distances (that is more complicated) between points (satellites) at known locations and a receiver (and here is the trick anyway as at least some of UWB transceivers need to be fixed at known locations).
Known, yes. Fixed, no, although it makes the math easier
Common errors (both spelling and semantics) are frequently added to the dictionaries. So likely due to Hollywood movies, this is the new common (mis-) understanding of that word.
Actually, you CAN mesure angles based on the <> on two antennas, given you know the exact distance between them.
Depending on setting (2D, 3D, 180°, 360° etc.) two may be too little, but in theory it is possible. However, in practice the distance between them needs to be large enough to make measuring time differences between them feasible. I believe, we are not there yet to put such antennae in a box of matches. If we were, we would have GNSS receivers doing that. Hmm, I wonder if they were more precise?
Hmmm unsure to ge your point, but let me say this use case is phone oriented, so yes you have 3 antennas at least, one pair to measure azimuth [-pi ; pi], one other pair for elevation ([-pi/2 ; pi/2]).
That’s how a phone gives the heading of an airtag for instance.
And no the distance as *not* to be quite big. For reference, here in some code, I have a typical value of 0.02mm !
Hum, sorry, the variable was suffixed _mm in the code, so I infered milimeters, but looking at the formula, it should be in meter. Futhermore, I found out this value is a default one for the “dev kit” I have on my desk, and definitly the two antenna patches are like 2cm away… So, 0.0208m, is 20.8mm, *NOT* 0.02mm !
Anyway the gap has to be around the 4 cm (for channel 5) or even less, to be able to capture a whole wavelength,
Can be both! The AirTag system can provide both distance and heading.
Since there sides completely define a triangle/trilateral, it is the same thing even though you are right.
I stand corrected. A triangle will give the ratio of the sides but not the distances between vertices or the orientation of the triangle. A single trilateral doesn’t give position but at least it gives lengths of sides and you can find the angles. I would imagine you would need three known points in three D space to locate any new point in 3D space.
“Transmissions are encoded not by modulation of discrete-frequency carriers as they would be in a conventional radio system, but by the emission of wideband pulses of RF energy across that bandwidth.”
It’s actually easiest to imagine UWB as being a *lot* more like what you would see on a typical scope if you viewed basically any serial data transmission – even like a UART – but just AC coupled (or high-pass filtered, however you want to think about it). If you just imagine a UART and AC couple it, you’ll see a series of spikes corresponding to the transitions.
In fact actually *generating* UWB is pretty freaking easy – sure, you need something with a ~50 ps risetime, but obviously ECL logic’s been doing that for a long time. Obviously *receiving* it’s a bit harder.
My experience with the DW1000 modules has been that reflections and obstacles are a big problem. It can determine the first pulse to arrive quite well, as long as it actually receives that pulse. But if you stand between the two devices, you instead receive reflections from various walls and read correspondingly larger distance. Or in wider open areas, simply have no reception at all on the other side of the obstacle.
So, from the sound of it, you need 3 static anchor tags (for multilateration) in clear line of sight to the rest of the ‘mobile’ tags that need tracking for this to have much chance of success? So 4 tags minimum for any sort of working indoor tracking system with any kind of accuracy. Sort of like making an indoor functioning mini GPS system, 3 satellites and a GPS module.
On top of that, don’t get between your tags and trackers during use or things go screwey, with radio refelections and shadows etc or you lose tracking accuracy, just like your GPS does in a tunnel :)
I am really strugling to see how these things are useful.
In the context of this artice, kerching!! (again) Apple.
I used the Decawave DWM1001 modules to make an indoor localization system.
https://github.com/jonathanrjpereira/DWM1001-Real-Time-Localization-System
Nope, I am afraid. This definition mixes two meanings. It starts by describing a process of dividing an area into a network of triangles and in the end tries (and fails) to refer to the method of determining a position of a point by measuring two angles at the ends of a known baseline. In the context of AirTags the first meaning makes very little sense, and second meaing makes only slightly more sense (I doubt radios are equipped with antennae capable of measuring angles of incidence). Moreover the brief description of the technique resembles GPS (and other GNSSs) which use pseudorange multilateration i.e. measurement of distances (that is more complicated) between points (satellites) at known locations and a receiver (and here is the trick anyway as at least some of UWB transceivers need to be fixed at known locations).
I avoid reading Hackaday at parties.
I avoid reading Hackaday at parties.
I avoid reading Hackaday at parties.
I’m Spartacus!
I read hackaday articles at parties. Out loud. As monologues.
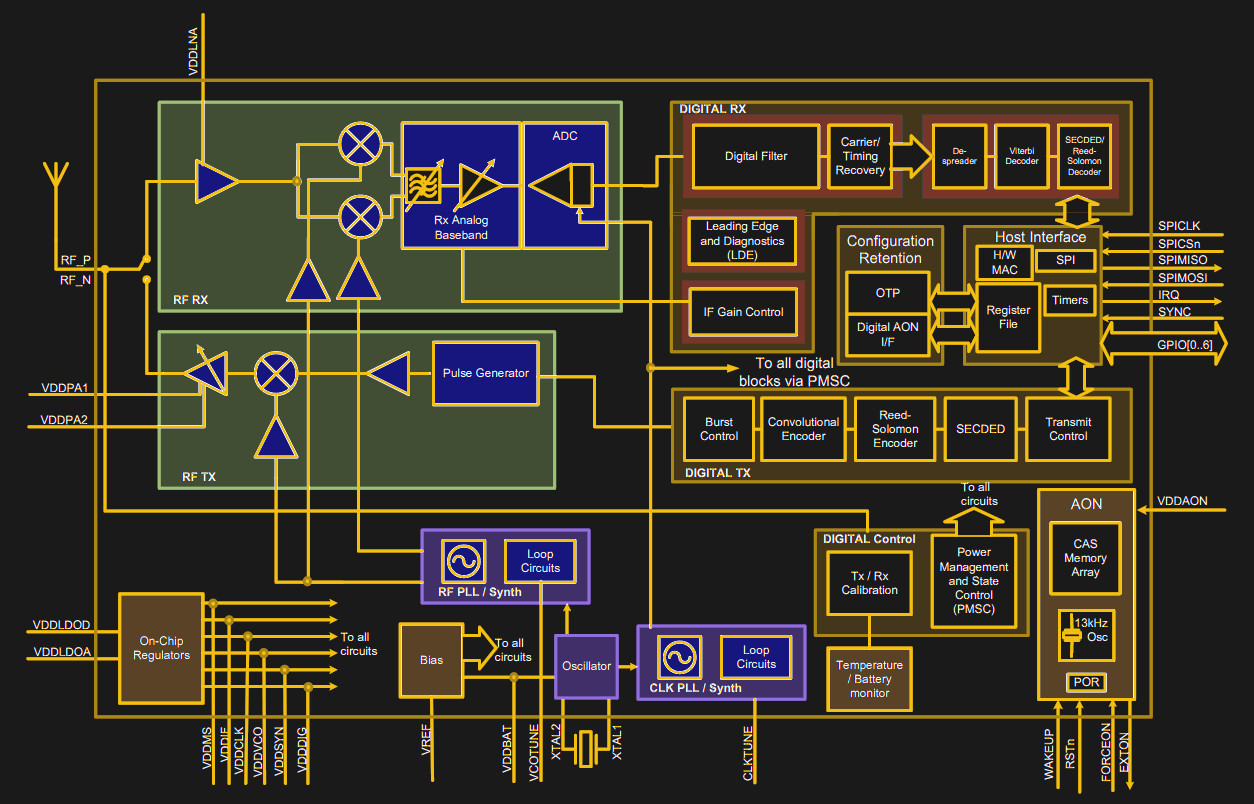
Made me want to read the datasheet real briefly to see what kind of performance capabilities the RF block has. Looks like might have some possible Analog RF potential to performance spectrum analysis easier than like say somehow using a GPS module RF Block only. Looks like these has AIO pins so maybe can be accessed without the Digital block processing?
Not certain what the frequency accuracy is… maybe 20ppm like the clock?
Is that right or am I way off in general regarding capabilities?
Looking at the DW1000 datasheet, I can’t seem to figure out a way to read the output of the ADC in the RF RX block before it gets processed by the DIGITAL RX block. That would be so cool though!
If someone could “undo” the processing done by the DIGITAL RX block after the fact, that would be like reconstructing raw ADC output in a way, right? Does anyone know how plausible that hack is?
could this uwb-tech be made into a new kind of radio-control receiver/transceiver for model aircraft or drones ? Would there be any advantages if possible ?
This doesn’t appear to have the range to appropriately control something like a drone. And if we’re talking about video signals etc, not enough data rate.
A single trilateral doesn’t give position but at least it gives lengths of sides and you can find the angles. I would imagine you would need three known points in three D space to locate any new point in 3D space.
good sharing, actually B&T is the mother company of Ai-Thinker, they are one company, and next month Ai-Thinker is going to launch BU03 module base on DMW3000(DMW3210) chip, BU01 is use DW1000 chip.
Compared with DWM1000, DW3000 has the following advantages:
1. In addition to supporting two-way ranging , TDOA positioning, DW3000 also support PDOA.
2. Most importantly: interoperable with Apple U1 chip and can work with Apple system
3. Fully connected with FiRa PHY, MAC, and certification development, more suitable for further application;
4. Lower power consumption, almost 1/3 of DWM1000;
5. Support UWB channel 5 (6.5GHz) and 9 (8GHz), while DWM1000 does not support Channel 9;
Details: https://medium.com/@taraqiuaithinker/ai-thinker-is-going-to-launch-new-uwb-module-bu03-dw3000-chip-ultra-wide-band-technology-ef97bdfbf85d