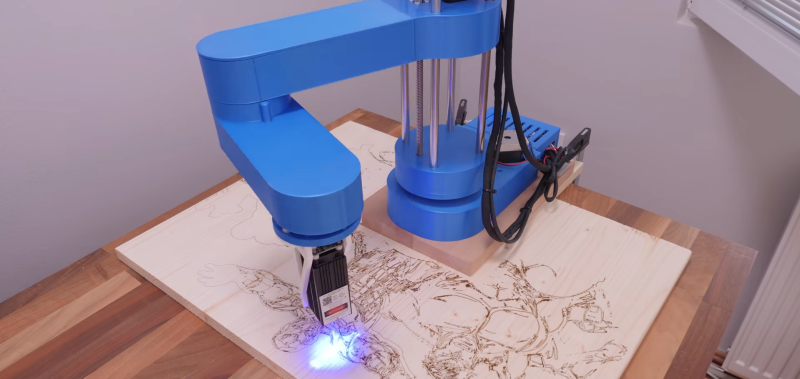
One of the limitations of the conventional Cartesian CNC platforms is that the working area will usually be smaller than its footprint. SCARA arms are one of the options to get around this, as demonstrated by [How To Mechatronics], with his SCARA laser engraver.
This robot arm is modified from the original build we featured a while back, which had a gripper mounted. It uses mainly standard 3D printer components with 3D printed frame parts. The arms lengths are sized to fold over the base and take up little table horizontal space when not in use. It can work in a large semi-circular area around itself, and if a proper locating and homing method is implemented, it can be moved around and engrave a large area section by section.
One of the challenges of SCARA arms is rigidity. As the cantilevered arm extends, it tends to lean over under its weight. In [How To Mechatronics]’s case, it showed up as skewed engravings, which he managed to mitigate to some degree in the Marlin firmware.
Another possible solution is to reduce the weight of the arms by moving the motors to the base, as was done with the Pybot or dual-arm SCARA printers like the RepRap Morgan.














You should point out how reckless it is not to have it in an enclosure.
While I don’t disagree, I would very much prefer if everyone used enclosures lots of lower power engraving tools don’t. Leaving operator safety up to laser safe eyewear. And assuming some other method keeps others from seeing – in the same way welders which can cause serious eye injury have to set up barrier to keep it from being seen by passersby.
And like welding it is safe enough for all concerned when the laser isn’t stupidly powerful and basic safety precautions are met.
Yeah except unlike some sand in your eyes from looking at someone welding, any flash of light from any laser powerful enough to heat, let alone mark something causes instant and permanent retina damage.
Only pointed directly into your eye for the low power laser stuff is it that bad (still not a good idea of course), and the right wavelengths for engraving generally won’t get to your retina before they have wrecked everything in front of it in the eye anyway giving you some time to blink etc – still far from safe, but low power cnc engravers are I would suggest better than welders in use – you can get an entire face full of weld flash directly easily should the welder be a moron and you don’t know its coming, the engraver doesn’t ever point at you so would take a real moron trying to cut a suitable mirror or something to actually reflect well enough one of those low power ones to cause you as much harm (but a real laser cutter is whole other story, those truly high power ones are stupidly scary really when you think about it)…
STILL PLEASE WEAR THE RIGHT DAMN SAFETY GEAR!!! THIS IS NOT SAYING IT IS SAFE!! Just that low power engravers are not that stupidly dangerous.
If visibility of the performed work is not a concern, the whole setup could be turned upside down, so the arm moves on a stable surface. This would prevent arm sagging?
That would make it really hard to hold engraved material steady and flat across the whole surface.
You could position the laser flat and use a 45 degree mirror to still project the beam downwards, it probably would have to be a special mirror with the reflecting layer on the outside to prevent it from absorbing heat.
I would love to see a build where the laser is driven by an unconstrained carriage, but wonder if that could achieve the needed 0.1mm position accuracy.
Easier to just add counterbalance to the back of the arm sections – I expect most of the droop is in those z rods and top arm joint so just weight on the back of that arm section to match the leverage of the arm at say 50% extension will help quite a bit. Hard to say without really being able to examine the machine maybe it also needs better stiffness in the arm beams or bearings, but I expect just a little counter weight will do wonders for it.
Your idea is sound, if the arm is running on the flat surface it will not sag, but as Vib says hard to hold the work piece that way.
Though it would make it even more complicated, what about a counterweight that moves away from the the arm as it extends? It would be similar to what I have seen on tower cranes, but complicated by the way the arm extends. Another option might be to retract the laser head as the arm extends. Granted, these might be overkill, but when has that stopped us?
some of the reprap morgans were designed with a mirror image behind them. in this case it would add too much complexity.
Yeah active counter balance would be nice, but it is significantly more work, and if that thing is at all close to ridged enough won’t really gain you anything over the simpler fixed weight.
Wouldn’t that just let the arm sag in the opposite direction?
Some rigidity can be achieved by placing the tool at a common point between two arms. But definitely move the motors out of the arm, if only for speed.
An unenclosed 2-5W laser, when 5mW is becoming problematic for eye safety! What could possibly go wrong?
All it needs is a reflection, and the operator will see (ho ho) the meaning of the traditional sign “Do not look into laser beam with remaining eye”.
You don’t need rigidity. You need feedback to know the true position of the head. Especially in a use case like this where forces are fixed, you can map out position offset with extension and then add a correction factor to the movements.
with marlin, this could be achieved through bed leveling. Just probe the surface prior to making a laser cut. It could get a little strange if there is optimization built in for which way the arm is bending to hit the same spot. i.e. if moving from the left, it is bent 90°, moving from the right it is bent 270°…
If the arm and therefore the laser sags to much, you lose focus.
Exactly.
It wouldn’t even require a firmware update. There are a few options out there and it’s relatively affordable, Bigtreetech and Makerbase both have a closed loop nema 17 with magnetic encoder, stm32 chip and integrated driver that are based on the same oss project.
It’s plug and play. You take out the current stepper driver and put their adapter in it’s place, which is really just a slug with pins on the bottom and a cable connector on the top. All the stepper control is handled by the controller on the back of the motor itself.
If you’re engraving a smooth, flat surface, couldn’t you support the laser head with rollers, or even an air cushion (like a hovercraft)? The latter idea could also be designed to blow cool air around the laser, and surround the laser with an opaque shield for eye safety.
This is a really cool idea. A head that’s fully supported in operation might also help cut costs on the arm, and a head-sized enclosure is going to be a lot cheaper to build than a full build area enclosure. Combined with 3d printed parts and cheap lasers, this could be a blueprint for a cheap, large 2d multi-material cutter, not just an engraver.
Ok, some how my mind goes into adaptive mode and im thinking what it would take to replace that laser for small drill to drill for example pcb holes.
nice project..!!
i have a question.. what kind of protection goggles are you using.. i have the same laser unit and i cant find the right googles..