Lego is a fun building block which vast numbers of the world’s children play with every day. However, the mechanical Technic line of Lego building blocks has long offered greater options to the budding engineer. [Brick Experiment Channel] is one such soul, working hard on their latest Lego submarine.
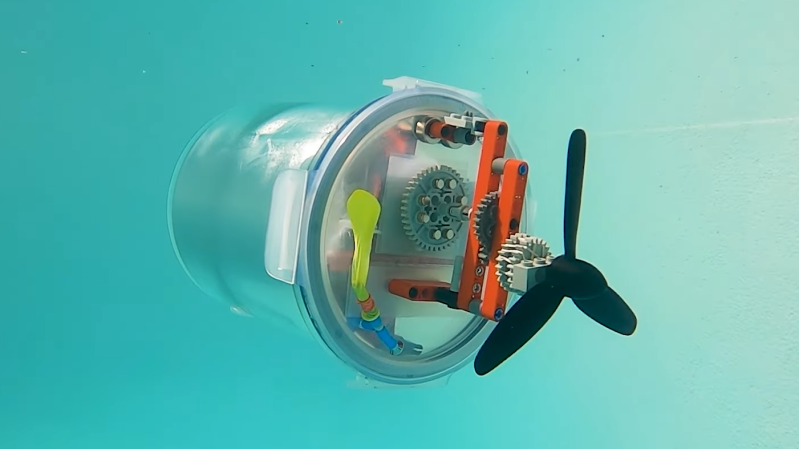
The sub is built inside of a glass food container, chosen for its removable plastic lid with a watertight seal. This keeps all the mechanics dry, as well as the custom electronics built to allow a 27MHz RC controller to send signals to the Lego electronics. This is key as higher frequency radios such as Bluetooth or WiFi can’t penetrate water nearly as well.
A magnetic coupling fitted to a Lego motor is used to drive the propeller in the water without the leaks common when trying to seal a rotating shaft. A second coupling on a Lego servo along with a creative steering arrangement allows the propeller to be turned to steer the craft.
The ballast system is simple. A balloon is filled by a Lego motor running an air pump, capable of 3.0 mL a second and capable of creating a maximum pressure of 2.0 bar. When the balloon is inflated, the buoyancy goes up and the sub rises. Run the motor the other way and the balloon is emptied by a clever clutch and valve arrangement, reducing buoyancy and causing the sub to sink.
The sub isn’t perfect. Maintaining a set depth underwater can be difficult with the rudimentary ballast system, perhaps as the balloon changes shape with varying water pressure. Sometimes, Lego axles slip out of their gears, too, and the radio only works for a few meters under water.
However, simply building a Lego sub of any sort is a remarkable feat. It’s interesting to see the variances in the design compared to earlier projects from [Brick Experiment Channel], too, as we’ve featured their earlier subs before. Video after the break.












Yes, hello. Welcome to my party.
Hmm, is there was a sonic controller that uses sound waves to transmit commands? I was thinking an ultrasonic speaker transmits binary blips, a microphone coupled to the hull receives the sound and converts it into byte commands, then the controller executes the commands.
Feedback from reflected signals would have to be accounted for.
What a great build!
You problems with depth control are because controlling depth purely by volume of air is unstable. When you become positively buoyant and rise a little, the volume of air expands, making the craft even more positively buoyant. When you go down, compression of the volume makes you even more negatively buoyant. This positive feedback loop makes the system unstable.
To make the system stable, you’d need a control system that adjust the amount of air (by grams / moles) depending on the depth / pressure.
Sub is a closed system, you can’t change the amount of air. But you are correct, this solution with compressable baloon has strong positive feedback. This feedback can be reduced be using water instead of air for buoyancy control. Using small water pump and water container inside submarine will make it more stable. Otherwise, great build. Oh, and magnetic coupling is brilliant idea.
I think a syringe would be ideal for that.
Maybe not ideal as in how to move the plunger in/out but as in sucking water in an simultaneously “compressing” the air inside the container by the same volume (which shouldn’t be a problem for the containers seal/lid because the outer water pressure is higher anyway I think).
Not sure how much pressure a normal syringe+plunger can withstand without leaking thou…
Let’s say they moved the balloon to the inside and reversed the pump operation. The pump would expel water from the internal bladder and venting would allow the water pressure to fill the balloon. You lose the positive feedback caused by the water pressure affecting balloon volume, but still need to create a feedback loop, constantly rippling the sub’s density around that of water’s to maintain depth.
Well, yes, he will need active depth control anyway, small positive feedback will always be there, and he needs to compensate it. But it should be controllable. Air filled balloon is too sensitive do changes, he can’t compensate pressure changes quick and precise.
That’s actually the way he designed his first sub.
awesome project. i know RF attenuation is a problem in water but would a FPV still work in shallow water?
Fishing float with an enameled copper wire antenna. So the end always sits above the surface.
Why do these brilliant ideas arrive at the end of summer?
Even real submarines have trouble with “hovering”. Ballast pumps work constantly to account for variations in salinity, water temperature, etc. Perhaps use the balloon to only approach neutral buoyancy then use a pump to take on or discharge a small amount of water from an on-board tank to trim. Also, use surfaces to “plane” to hold the vessel down (or up) while moving so as not to have to remain exactly at neutral. But otherwise, pretty neat. Oh, did I see him dip the antenna in the water? Bad bad bad grounding the antenna. Perhaps find an old 27Mhz R/C system meant for surface use (cars and such) that puts out more power, and spiral the RX antenna around the inside of the vessel for better pickup.
Mount an absolute pressure transducer thru the hull to measure water pressure [depth], and use that in a feedback loop with the balloon/air pump to set the depth the sub should float at.
We all live in a lego submarine.
*sing* Lego submarine *sing*
Nice.
I came here to post that…
B^)
Not disappointed!
I really love that style of video. No flashy graphics or obnoxious music, no silly dialogue or facial expressions, just straight to the point and mostly showing exactly what was done. It is a very cool build too.
what was that thing hanging on ?
Camera
This is also a way scuba divers control bouyancy— fill the lungs from the tank to go up, exhale to go down.